文章目录[隐藏]
- 视觉招聘小黑板
- 行业资讯
- (十)实践出真知——Ubuntu 18.04 VSCODE配置OpenCV4.5运行YOLO4模型 2023-10-12 09:51
- 程序员把工作完全自动化了是什么体验? 2021-11-01 20:26
- 汇川技术首款OCR智能相机重磅发布 2023-10-17 17:40:02
- 基于激光的3D三角测量系统中激光线参数设置 2023-10-19 11:17:19
- 机器视觉之图像增强和图像处理-电子发烧友网 2023-10-26 08:07
- 世瞳微电子发布基于多点dToF的角度检测方案―新闻频道- 视觉系统设计 2023/10/30 11:11:52
- 艾迈斯欧司朗180纳米CMOS工艺线适用于传感器及ASIC―新闻频道- 视觉系统设计 2023/10/30 11:10:07
- 豪威发布新款4K分辨率图像传感器―新闻频道- 视觉系统设计 2023/10/27 23:47:42
- 3CMOS棱镜式彩色面阵相机―产品聚焦频道- 视觉系统设计 2023/10/27 23:45:18
- 双远心镜头及其检测应用―技术与应用频道- 视觉系统设计 2023/10/30 11:32:29
- Point-aware Interaction and CNN-induced Refinement Network for RGB-D salient object detection论文阅读 2023-10-30 18:08
- ICCV23 LED Raw图去噪 无需标定 微调迁移 2023-10-30 15:15
- ICCV 2023 | 通用数据增强技术,随机量化适用于任意数据模态 2023-10-29 13:25
- 当前最火文生图背后的Diffusion model综述串讲--数学原理与应用 2023-10-30 11:36
- 斯蒂文斯理工学院等发布EDI:基于ESKF的视觉惯性SLAM系统的不相交初始化 2023-10-30 14:42
- GraphAlign:通过图匹配增强多模态3D目标检测的准确特征对齐 2023-10-30 16:58
- 5分钟搞定深度学习中间特征可视化 2023-10-29 00:08
- CV计算机视觉每日开源代码Paper with code速览-2023.10.30 2023-10-30 12:14
- DSRNet:西工大&哈工大&腾讯&朴次茅斯大学 提出一种动态网络的图像超分辨方法 2023-10-30 11:11
- YOLO目标检测器中间特征可视化代码 2023-10-29 20:02
- Mastering AI Optimization and Deployment with Intel’s OpenVINO Toolkit: 2023-10-30T08:39:56+00:00
- Tarun R Jain: 2023-10-30
视觉招聘小黑板
机器视觉工程师 ,1-1.6万昆山2年本科,计算机软件民营
急聘硬件工程师(机器视觉) ,1.5-2.2万东莞·塘厦镇5-7年大专,互联网/电子商务已上市
高级机器视觉工程师(苏州/徐州) ,1.2-2.4万·13薪苏州·相城区3-4年本科,汽车零配件民营
机器视觉工程师 ,1-1.8万苏州2年本科,电子技术/半导体/集成电路民营
机器视觉工程师 ,1.6-3.2万·13薪苏州·苏州工业园区2年本科,电子技术/半导体/集成电路民营
机器视觉工程师(Halcon+C#) ,1.2-2万杭州·拱墅区2年本科,电子技术/半导体/集成电路民营
机器视觉硬件测试工程师 ,7千-1.2万·13薪深圳·南山区1年本科,计算机硬件民营
销售总监(机器视觉及深度学习解决方案) ,25-50万/年深圳·南山区5-7年本科,仪器仪表/工业自动化民营
机器视觉大客户经理 ,2-3.5万上海·徐汇区3-4年本科,电子技术/半导体/集成电路民营
软件工程师(机器视觉) ,8千-1.3万上海·松江区1年本科,仪器仪表/工业自动化民营
机器视觉调试工程师 ,1.2-1.8万北京·通州区3-4年大专,仪器仪表/工业自动化民营
机器视觉系统开发工程师 ,9千-1.5万·14薪苏州·苏州工业园区3-4年本科,电子技术/半导体/集成电路民营
机器视觉工程师 ,1.5-2.5万惠州·大亚湾区3-4年大专,机械/设备/重工合资
软件工程师(机器视觉) ,1-1.5万上海·松江区3-4年本科,仪器仪表/工业自动化民营
机器视觉调试工程师 ,8千-1.5万长沙·长沙县3-4年大专,仪器仪表/工业自动化民营
机器视觉工程师 ,6-8千·14薪苏州·苏州工业园区2年本科,电子技术/半导体/集成电路民营
机器视觉工程师 ,2.5-4万上海·普陀区5-7年硕士,新能源已上市
机器视觉工程师 ,8千-1.5万芜湖2年本科,计算机软件民营
机器视觉调试工程师 ,1-1.8万南京·江宁区3-4年大专,仪器仪表/工业自动化民营
机器视觉开发工程师: ,15-30万/年泰州3-4年本科,汽车已上市
欲了解详情,请在公众号后台回复:231030
行业资讯
(十)实践出真知——Ubuntu 18.04 VSCODE配置OpenCV4.5运行YOLO4模型 2023-10-12 09:51
技术更新真的十分迅速,本来还想着使用YOLO4进行模型训练然后布署到工程当中,又涉及到模型转换以及硬件环境支持问题。偶然才发现原来opencv4已经支持YOLO4,尝试后发现无论是开源训练好的模型还是说自己训练的模型都可以跑的溜溜的。再次感谢网上技术大神的无私奉献,后附参考博客内容。
一、ubuntu下安装opencv,并配置DNN模块使用CUDA加速
源码下载
opencv源码下载
下载地址 opencv_contrib模块下载
若想通过DNN模块使用cuda加速,opencv需要与opencv_contrib模块联合编译。
下载地址
1 安装前准备
1.1 安装依赖
安装cmake(编译器)和依赖库
$ sudo apt-get install cmake #如果已经安装过cmake,则
......长按二维码访问原文

程序员把工作完全自动化了是什么体验? 2021-11-01 20:26
说个真实故事。
那时候我在一家对日外包小公司,公司最近接了一个超扯淡的活儿,不允许使用接口,所有的扩展全是代码硬改,我们用的是C#, 这种工作原本应当设计成多态。
然后,我为了应付这个垃圾活儿,做了一个代码生成器,只要填上参数,就能完美生成代码。
一个难得的休息日过后,我和整个小组的人都被开了……
......长按二维码访问原文

汇川技术首款OCR智能相机重磅发布 2023-10-17 17:40:02
相关推荐
汇川技术MSCI ESG评级提升至A 日前,国际权威指数机构摩根士丹利资本国际公司(中文简称“明晟”,英文简称“MSCI”)公布了最新的ESG评级结果,汇川技术MSCI ESG评级提升至A级,这表明汇川技术在ESG管理方面再进一步。 汇 2023-10-17 17:40:02 74
转载 | 关注|SGS为汇川机器人颁发北美认证证书 近日,国际公认的测试、检验和认证机构SGS携手深圳市汇川技术股份有限公司(以下简称“汇川技术”)成功举办“SGS北美认证(SGS NA Listed Mark)证书”颁证仪式。SGS消费 2023-10-10 17:20:02 173
新大洲本田到访汇川技术,探索企业精益制造与数字化转型新经验 原文标题:新大洲本田到访汇川技术,探索企业精益制造与数字化转型新经验 文
......长按二维码访问原文

基于激光的3D三角测量系统中激光线参数设置 2023-10-19 11:17:19
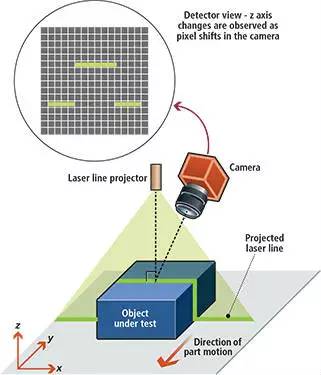
测量的概念并不复杂,但在系统实施的过程中,有许多关键的细节必须解决,包括如何配置基于激光的3D三角测量系统以及如何设置激光线 参数 。
在基于激光的三角测量系统中,将一条狭窄的光带投影到3D表面,在非投影器的观察视角将会看到一条呈现扭曲的光线 (图1)。分析这些光线图像的形状,其结果可被用来进行物体表面形状的精确几何重构。
图1:从投射器以外的视角看到出现扭曲的激光线。这种失真被用来推导被测物的尺寸。
在一个3D三角测量系统中有4个重要的组成部分:摄像机、结构激光器、在整个拍摄视场中移动被测物或摄像机/激光器系统的 机械 结构、以及一款能够处理图像并能精确将像素位移转换成高度差异的图像软件。
三角测量结构
激光线投影系统有许多种不同的实现方式,每一种都有其独特的优缺点。图2展示了4种最常见的几何结构。
......长按二维码访问原文

机器视觉之图像增强和图像处理-电子发烧友网 2023-10-26 08:07
一、图像处理技术概述
1.定义
对原始获取图像进行一系列的运算处理,称为图像处理。图像处理是 机器视觉 技术的方法基础,包括图像增强、边缘提取、图像分割、形态学处理、图像投影、配准定位和图像特征提取等方法。
2.颜色的基本定义
GB 5698-85,颜色定义为:色是“光作用于人眼引起除形象以外的视觉特性”。
3.三原色(tricolor)
二、图像增强概述
1.改善图像质量两类方法
•不考虑图像降质原因——图像增强技术
•针对图像降质原因——图像还原技术
2.图像增强技术两类方法:
(1)空间域法: 在空间域中对图像的各个像素灰度值直接进行计算处理;
(2)频率域法: 在图像的频率变化域中对图像的变换值进行某种运算处理,然后再变回空间域中。
三、空域图像增强
1.定义
空域法是直接
......长按二维码访问原文

世瞳微电子发布基于多点dToF的角度检测方案―新闻频道- 视觉系统设计 2023/10/30 11:11:52
近期,国内领先的SPAD dToF国产厂商世瞳(上海)微电子科技有限公司(简称:世瞳微电子)发布了多点dToF传感器DA0103,以及基于该传感器的角度检测解决方案,可实现精度小于1°的平面倾斜角度检测,助力智能投影仪实现快速对焦和梯形矫正。
世瞳微电子成立于2021年初,总部位于上海张江,专注于设计和开发高精度、低功耗、并具备成本竞争力的SPAD dToF传感芯片。成立至今,世瞳微电子积累了丰富的SPAD相关技术及经验,并成功推出了SPAD面阵芯片、Spot dToF系统、dToF距离传感器等新品,引起业界广泛关注。未来,世瞳微电子希望继续向车载激光雷达(LiDAR)和AR/VR市场拓展。
此次,世瞳微电子发布的基于多点dToF传感器的角度检测方案,相比传统的摄像头对焦和梯形矫正方案,具有如下优势:
1
......长按二维码访问原文

艾迈斯欧司朗180纳米CMOS工艺线适用于传感器及ASIC―新闻频道- 视觉系统设计 2023/10/30 11:10:07
艾迈斯欧司朗拥有三十年的专业经验,为先进的模拟和混合信号技术提供代工生产和支持服务。目前,艾迈斯欧司朗已经将先进的 180 纳米 CMOS 工艺技术整合到其全方位晶圆代工服务中。在提供先进高性能模拟/混合信号集成电路解决方案一站式服务的战略中,这是艾迈斯欧司朗的最新举措。除了晶圆制造和工艺定制,还提供:设计和工程支持、IP单元、封装和 IC 集成、晶圆针测和晶圆终测。
位于奥地利的艾迈斯欧司朗200mm工厂即将采用新型C18 180纳米 CMOS技术进行生产,这种技术非常适合用于工业、医疗、汽车和消费品市场的传感器和传感器接口。在汽车和医疗应用的设计中,该技术也将大显身手。艾迈斯欧司朗计划下一个季度让使用C18 180纳米技术的产品实现量产。这一技术符合行业标准,源自全球领先的半导体合同制造商,确保了100%
......长按二维码访问原文

豪威发布新款4K分辨率图像传感器―新闻频道- 视觉系统设计 2023/10/27 23:47:42
豪威集团,全球排名前列的先进数字成像、模拟、触屏和显示技术等半导体解决方案开发商,发布新品OS08C10。这款800万像素背照式(BSI)图像传感器采用交错高动态范围(HDR)和单次曝光双模拟增益(DAG)技术,可在严苛的照明条件下实现高性能成像。OS08C10基于1.45微米BSI像素,同时支持超高清4K分辨率和高帧率。OS08C10采用小尺寸1/2.8英寸光学格式,这是家用和专业安防、物联网和运动摄像头的常用尺寸。
豪威集团资深市场经理Cheney Zhang表示:“我们的新款1.45微米像素OS08C10图像传感器具有更高的灵敏度和更低的读出噪声,因此缩小了与传统安防市场高性能成像所需的大像素图像传感器之间的差距。OS08C10支持交错HDR和DAG HDR。交错HDR能够扩展明暗条件下的动态范围;新增
......长按二维码访问原文

3CMOS棱镜式彩色面阵相机―产品聚焦频道- 视觉系统设计 2023/10/27 23:45:18
AP-3200T系列是3-CMOS棱镜式工业面阵扫描相机,具有3 x 320万像素。它可提供比传统拜耳彩色相机更佳的色彩保真度和空间分辨率,并专为机器视觉、生命科学和显微镜应用中的精准色彩成像和检查任务而设计。
棱镜式成像技术 vs 传统拜耳彩色成像技术
十分精准的彩色图像数据
借助特殊的棱镜式成像技术,入射光线被分为红色、绿色和蓝色波长,由三个精确对准的CMOS传感器捕捉。与使用拜耳马赛克技术的传统彩色相机相比,其色彩精确度和空间精度更高。
高分辨率与高帧速率结合
AP-3200T-10GE 围绕三个Sony Pregius IMX252传感器进行构建。此机器视觉相机与 GigE Vision 接口结合,可在全分辨率下以12帧/秒的速度输出高达3 x 320万像素。
灵活的颜色空间转换
AP-3
......长按二维码访问原文

双远心镜头及其检测应用―技术与应用频道- 视觉系统设计 2023/10/30 11:32:29
双远心镜头特殊的光学设计,能使相机接收平行光,解决视差带来的检测精度问题;还能避免杂散光,保证图像轮廓清晰。
传统工业镜头在机器视觉系统和科研中有十分重要的作用,主要应用于各种零件、玻璃制品、电子元件等产品的测量,不但应用范围广,且应用量大。随着技术的发展,面对越来越多样化的被测物体和检测项目,人们对测量精度的要求不断提高,双远心镜头的使用越来越广。
双远心镜头
普通FA镜头成像存在近大远小的特性,会使检测的精确性大打折扣。为了纠正普通FA镜头的视差影响,远心镜头应运而生。
图1:光虎光学德国设计的高精度双远心镜头。
光虎光学的双远心镜头得益于特殊的光学设计,能够使得光线在进出光学系统时与光轴平行;由于平行光的入射,使得双远心镜头拍摄下的物体表面成像倍率恒定,彻底解决视差带来的精密检测问题;同样避免杂
......长按二维码访问原文

Point-aware Interaction and CNN-induced Refinement Network for RGB-D salient object detection论文阅读 2023-10-30 18:08
论文地址:[2308.08930] Point-aware Interaction and CNN-induced Refinement Network for RGB-D Salient Object Detection (arxiv.org)
代码开源:rmcong/PICR-Net_ACMMM23 (github.com)
1、介绍
通过将彩色图像和深度图的互补信息整合在一起,可以提高对复杂和具有挑战性场景的显著目标检测(SOD)的能力。近年来,卷积神经网络(CNNs)在特征提取和跨模态交互方面的重要作用已经得到充分探索,但在建模自模态和跨模态的全局长程依赖性方面仍然不足。为此,引入了CNNs辅助的Transformer架构,并提出了一种创新的RGB-D SOD网络,具有Point-aware In
......长按二维码访问原文

ICCV23 LED Raw图去噪 无需标定 微调迁移 2023-10-30 15:15
Lighting Every Darkness in Two Pairs: A Calibration-Free Pipeline for RAW Denoising
本文是ICCV 2023一篇做Raw Denoising的文章,是南开和NTU S-Lab 李重仪组里的工作,李重仪老师在Low Light方向有不错的研究
Introduction
基于标定的噪声合成有如下的流程:
1.根据传感器对噪声建模 2.对于特定camera标定噪声模型 3.基于标定的噪声模型合成数据
这样方法有如下缺陷:
1.基于标定的数据收集需要一个稳定的光照环境,并且后处理很复杂
2.对特定相机标定的网络很难迁移泛化到其它相机上,即网络与相机高度耦合,标定工作重复耗时
3.存在out-of-model噪声,
......长按二维码访问原文

ICCV 2023 | 通用数据增强技术,随机量化适用于任意数据模态 2023-10-29 13:25
前言 本文提出了一种适用于任意数据模态的自监督学习数据增强技术。
本文转载自机器之心
仅用于学术分享,若侵权请联系删除
欢迎关注公众号CV技术指南,专注于计算机视觉的技术总结、最新技术跟踪、经典论文解读、CV招聘信息。
CV各大方向专栏与各个部署框架最全教程整理
【CV技术指南】CV全栈指导班、基础入门班、论文指导班 全面上线!!
自监督学习算法在自然语言处理、计算机视觉等领域取得了重大进展。这些自监督学习算法尽管在概念上是通用的,但是在具体操作上是基于特定的数据模态的。这意味着需要为不同的数据模态开发不同的自监督学习算法。为此,本文提出了一种通用的数据增强技术,可以应用于任意数据模态。相较于已有的通用的自监督学习,该方法能够取得明显的性能提升,同时能够代替一系列为特定模态设计的复杂的数据增强方式并
......长按二维码访问原文

当前最火文生图背后的Diffusion model综述串讲--数学原理与应用 2023-10-30 11:36
近年来图像生成模型席卷计算机视觉和计算机图形学领域,本视频立足于2023 arxiv上斯坦福,谷歌等单位发表的工作《state of the art on diffusion models for visual computing》,讲述生成模型背后的基础架构扩散模型的数学原理,以及在2d图像,3d视频方面的应用。
【当前最火文生图背后的Diffusion model综述串讲--数学原理与应用】 当前最火文生图背后的Diffusion model综述串讲--数学原理与应用_哔哩哔哩_bilibili
......长按二维码访问原文

斯蒂文斯理工学院等发布EDI:基于ESKF的视觉惯性SLAM系统的不相交初始化 2023-10-30 14:42
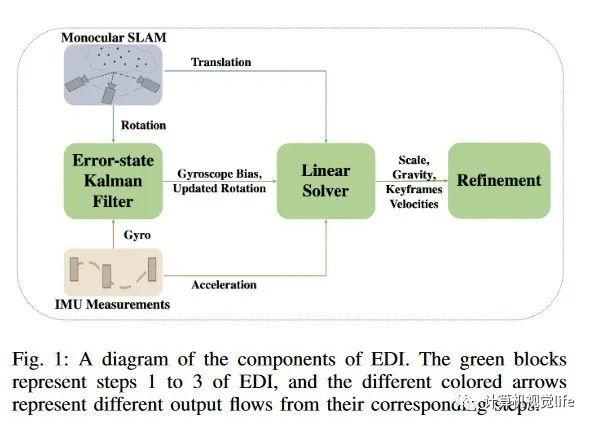
#论文# ICIR 2023| 斯蒂文斯理工学院、Meta、杭州电子科技大学发布EDI:基于ESKF的视觉惯性SLAM系统的不相交初始化
【EDI: ESKF-based Disjoint Initialization for Visual-Inertial SLAM Systems】
文章链接:http://arxiv.org/abs/2308.02670
视觉惯性初始化可以分为联合和不相交两种方法。联合方法通过将来自特征点的观测进行IMU积分,然后使用视觉和加速度观测的闭式解来对齐视觉和惯性参数,从而同时处理视觉和惯性参数。相比之下,不相交方法通过独立解决运动结构(SFM)问题,并从纯单目SLAM获得的尺度不确定相机姿态中确定惯性参数。然而,以往的不相交方法存在一些限制,比如假设加速度偏差影响可忽略,
......长按二维码访问原文

GraphAlign:通过图匹配增强多模态3D目标检测的准确特征对齐 2023-10-30 16:58
原标题:GraphAlign: Enhancing Accurate Feature Alignment by Graph matching for Multi-Modal 3D Object Detection
论文链接: https:// arxiv.org/pdf/2310.0826 1.pdf
作者单位:北京交通大学 河北科技大学 清华大学
论文思路:
LiDAR 和摄像头是自动驾驶中 3D 目标检测的互补传感器。然而,探索点云和图像之间的非自然交互(unnatural interaction)具有挑战性,关键因素是如何进行异构模态的特征对齐。目前,许多方法仅通过投影校准来实现特征对齐,没有考虑传感器之间的坐标转换精度误差问题,导致性能次优。本文提出了 GraphAlign,这是一种通过图匹配(
......长按二维码访问原文

5分钟搞定深度学习中间特征可视化 2023-10-29 00:08
精华置顶
墙裂推荐!小白如何1个月系统学习CV核心知识:链接
点击@CV计算机视觉,关注更多CV干货
点击加入—>CV计算机视觉交流群
今天跟大家分享一个可视化CNN/ViT中间特征的库:pytorch-grad-cam
下载地址:https://github.com/jacobgil/pytorch-grad-cam
pytorch-grad-cam支持多种可视化方法,如下表所示:
一些可视化示例
5分钟实现网络特征可视化
(1)安装pytorch-grad-cam
在安装完pytorch和torchvision库后,使用命令 pip install grad-cam 安装pytorch-grad-cam。
(2)导入所需的库,定义model
这里直接使用torchvision中带有预
......长按二维码访问原文

CV计算机视觉每日开源代码Paper with code速览-2023.10.30 2023-10-30 12:14
精华置顶
墙裂推荐!小白如何1个月系统学习CV核心知识:链接
点击@CV计算机视觉,关注更多CV干货
论文已打包,点击进入—>下载界面
点击加入—>CV计算机视觉交流群
1.【语义分割】(NeurIPS2023)SmooSeg: Smoothness Prior for Unsupervised Semantic Segmentation
2.【3D目标检测】What You See Is What You Detect: Towards better Object Densification in 3D detection
3.【领域泛化】(NeurIPS2023)Diversifying Spatial-Temporal Perception for Video Domain Generali
......长按二维码访问原文

DSRNet:西工大&哈工大&腾讯&朴次茅斯大学 提出一种动态网络的图像超分辨方法 2023-10-30 11:11
作者丨田春伟,张璇昱,张琦,杨明明,琚兆杰
来源丨西北工业大学、空天地海一体化大数据应用技术国家工程实验室、哈尔滨工业大学(威海)、腾讯、朴次茅斯大学
本文分享论文“Image super-resolution via dynamic network”,由西工大&哈工大&腾讯&朴次茅斯大学联合提出一种动态网络的图像超分辨方法。
论文链接:https://arxiv.org/abs/2310.10413
项目链接:https://github.com/hellloxiaotian/DSRNet
01 摘要
卷积神经网络(Convolutional Neural Networks, CNNs)依赖于深度网络架构来提取用于图像超分辨率的精确信息。然而,这些卷积神经网络获得的结构信息不能完全表达复杂场景下预
......长按二维码访问原文

YOLO目标检测器中间特征可视化代码 2023-10-29 20:02
精华置顶
墙裂推荐!小白如何1个月系统学习CV核心知识:链接
点击@CV计算机视觉,关注更多CV干货
点击加入—>CV计算机视觉交流群
今天跟大家分享可视化目标检测网络中间特征的方法和代码。
前面我们介绍了图像分类网络的可视化方法(链接:5分钟搞定深度学习中间特征可视化);对于目标检测网络,可视化方法是类似的。
这里我们以YOLOv5为例,使用EigenCAM算法进行Detect前面一层的特征可视化。
EigenCAM算法出自论文《Eigen-CAM: Class Activation Map using Principal Components》,这篇论文提出的Eigen-CAM计算并可视化卷积层中学习到的特征的主成分。
使用 pytorch-grad-cam 进行可视化,在使用时需要注意以下
......长按二维码访问原文

Mastering AI Optimization and Deployment with Intel’s OpenVINO Toolkit: 2023-10-30T08:39:56+00:00
Introduction
We talk about AI almost daily due to its growing impact in replacing humans’ manual work. Building AI-enabled software has rapidly grown in a brief time. Enterprises and businesses believe in integrating reliable and responsible AI in their application to generate more revenue. The most challenging part of integrating AI into an application is
......长按二维码访问原文

Tarun R Jain: 2023-10-30
We use cookies on Analytics Vidhya websites to deliver our services, analyze web traffic, and improve your experience on the site. By using Analytics Vidhya, you agree to our Privacy Policy and Terms of Use
......长按二维码访问原文







