一:基于两阶段的目标检测算法
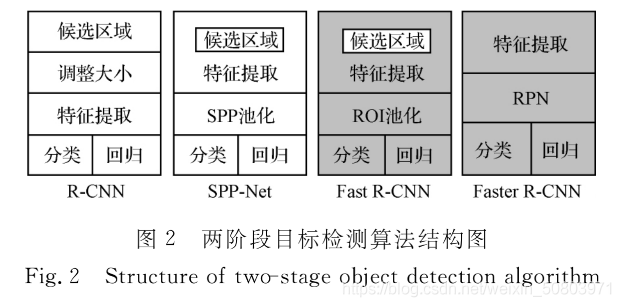
基于两阶段方法的目标检测又被称为基于**候选区域(region proposal)**的方法。
从2014年Grishick等人 在AlexNet 的基础上将region proposal和CNN结合起来,提出了R-CNN.
He等在卷积神经网络中使用了空间金字塔池化模块**(SSP)**,解决了输入固定大小图片的限制且避免了重复提取图像特征。
2015年,Grishick在R-CNN和 SPP- Net算法基础上提出了使用兴趣区域池化(Region 0f Interest,ROI)的Faster R-CNN,实现了端到端的检测。
Ren等提出了Faster R-CNN 改进了候选区域的生成方法,使用候选区域生成网络(Region Proposal Network ),实现了整个网络共享卷积特征,进一步提高了检测速度。
版权声明:本文为CSDN博主「被CV耽误了的文人」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_50803971/article/details/117961639






