文章目录[隐藏]
一、相关介绍
NMS在单个模型的的边界框过滤中表现还是不错的,但是对于多个模型的,NMS只是进行边界框的选择,去除部分预测,无法有效生成组合了多个模型的预测的平均坐标。
NMS
一个模型在图片检测中的预测包括边界框,分类标签以及其相依的置信度。在NMS方法中,如果边界框交际过大,或者重合就会被认为是同一单个目标,因此IoU的阈值会直接影响边界最后过滤的质量,也会影响最后模型的表现。阈值的选择也会存在一定的技巧,不同的任务可能设置的阈值时不同的。比如下面这个图,如果阈值设为0.5,那最后只会输出一个边界框。

Soft-NMS
Soft-NMS的提出就会减少以上的问题。避免完全去除高置信度和高IoU的检测proposal,会减少和IoU值成正比的置信度值。即Soft-NMS会按比例降低重叠的边界框的置信度得分,就上图而言,绿色和黄色重叠很大,最终会被去除。
虽然有相较于NMS确实有提升,但都放弃的冗余边界框,因此无法从多个模型中有效生成平均坐标预测。
二、Weighted Boxes Fusion
主要介绍这种新颖的边界框融合方法:WBF。假设使用N个不同模型对相同的图片进行边界框预测,或者说是对于相同的模型,对于相同的图片和增强后的图片预测量了N次(类似于TTA)。
然后算法如下操作:
-
将每个模型的每个预测边界框加入到一个单独的列表
B
\mathbf B
B中,按照置信度
C
\mathbf C
C进行递减排序。
-
分别为边界框簇和融合后的边界框分别声明空列表
L
\mathbf L
L和
F
\mathbf F
F。列表
L
\mathbf L
L中的每个位置,可以包含一个边界框或者一个边界框集合,形成一个簇。
F
\mathbf F
F中每个位置只包含一个边界框,从相应的
L
\mathbf L
L中的簇中融合出来的边界框。公式稍后介绍。
-
在一个循环中迭代
B
\mathbf B
B中的预测框,尝试找到列表F中的一个匹配边界框。匹配的定义为一个边界框在IoU>阈值的情况下存在很大的重叠。该实验阈值设置为0.55。
-
如果未找到匹配,则将
B
\mathbf B
B作为一个新的实体加入到列表
L
\mathbf L
L和
F
\mathbf F
F的最后,继续对
B
\mathbf B
B中下一个边界框进行处理。
-
如果找到匹配,则将该框添加到列表
L
\mathbf L
L中与列表
F
\mathbf F
F中匹配框对应的位置
p
o
s
\mathbf{pos}
pos处。
-
使用所有的在簇
L
[
p
o
s
]
\mathbf{L[pos]}
L[pos]中的
T
T
T个边界框重新计算
F
[
p
o
s
]
\mathbf{F[pos]}
F[pos]中边界框的坐标和置信度得分:
C
=
∑
i
=
1
T
C
i
T
(1)
\mathbf{C}=\frac{\sum_{i=1}^{\mathbf{T}} \mathbf{C}_{i}}{T}\tag{1}
C=T∑i=1TCi(1)
X
1
,
2
=
∑
i
=
1
T
C
i
∗
X
1
,
2
i
∑
i
=
1
T
C
i
(2)
\mathbf{X} \mathbf{1}, \mathbf{2}=\frac{\sum_{i=1}^{\mathbf{T}} \mathbf{C}_{i} * \mathbf{X} \mathbf{1}, \mathbf{2}_{i}}{\sum_{i=1}^{\mathrm{T}} \mathbf{C}_{i}}\tag{2}
X1,2=∑i=1TCi∑i=1TCi∗X1,2i(2)
Y
1
,
2
=
∑
i
=
1
T
C
i
∗
Y
1
,
2
i
∑
i
=
1
T
C
i
(3)
\mathbf{Y} \mathbf{1}, \mathbf{2}=\frac{\sum_{i=1}^{\mathbf{T}} \mathbf{C}_{i} * \mathbf{Y} \mathbf{1}, \mathbf{2}_{i}}{\sum_{i=1}^{\mathbf{T}} \mathbf{C}_{i}}\tag{3}
Y1,2=∑i=1TCi∑i=1TCi∗Y1,2i(3)注意也可以使用一些非线性的权重如
C
2
,
s
q
r
t
(
C
)
\mathbf{C^2},sqrt(\mathbf{C})
C2,sqrt(C)等。
融合框的置信度为所有形成他的边界框的平均置信度,而其坐标也是所有形成他的边界框的坐标的加权和,权重为相应的边界框的置信度。也就是置信度越高的边界框对于融合边界框的坐标做出的贡献越大。
-
当
B
\mathbf B
B中的所有边界框都被处理了,对
F
\mathbf F
F列表的置信度得分重新缩估计:乘上簇中的边界框个数,在除以模型数目。也就是当簇中边界框数目少的时候,则认为有较少的边界框预测该融合框,也就是该融合框的置信度应该降低:
C
=
C
∗
min
(
T
,
N
)
N
(4)
\mathbf{C}=\mathbf{C} * \frac{\min (T, N)}{N} \tag{4}
C=C∗Nmin(T,N)(4)
或者C
=
C
∗
T
N
(5)
\mathbf{C}=\mathbf{C} * \frac{T}{N} \tag{5}
C=C∗NT(5)实践中第一种稍微好一点。
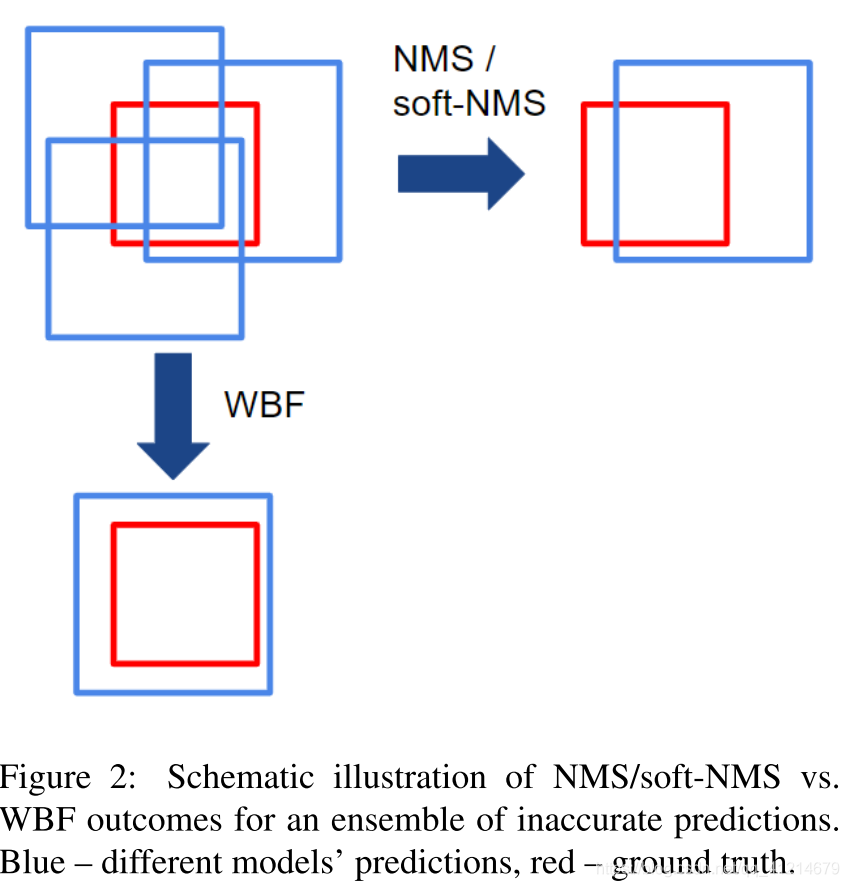
NMS和soft-NMS都是直接排除边界框,而WBF是利用了所有的边界框。他可以修正那些被所有模型都预测错误的例子。NMS和soft-NMS处理后会剩下唯一一个错误边界框,而WBF会直接将这些错误边界框进行融合。
**non-maximum weighted(NMW)**相较于本方法,他不会去修改边界框的置信度:他使用IoU值来为边界框赋权,然后使用最大置信度的边界框和其他重叠的边界框进行比较,当然他也没有利用预测模型的个数这个信息,实验对比在下面给出。
三、实验与思考
本次实验使用Open Images和COCO两个检测数据集进行实验。
对所有阈值进行实验室,在每个阈值
t
t
t(阈值从0.5-0.95,每0.05一次实验),会由TP,FN和FP来计算一个精确值:
Precision
(
t
)
=
T
P
(
t
)
T
P
(
t
)
+
F
P
(
t
)
+
F
N
(
t
)
\operatorname{Precision}(t)=\frac{T P(t)}{T P(t)+F P(t)+F N(t)}
Precision(t)=TP(t)+FP(t)+FN(t)TP(t)
AP计算如下:
A
P
=
1
∣
thresholds
∣
∑
t
T
P
(
t
)
T
P
(
t
)
+
F
P
(
t
)
+
F
N
(
t
)
A P=\frac{1}{\mid \text { thresholds } \mid} \sum_{t} \frac{T P(t)}{T P(t)+F P(t)+F N(t)}
AP=∣ thresholds ∣1t∑TP(t)+FP(t)+FN(t)TP(t)
以下检测方法中的NMS后处理并没有解除,即先进性的NMS后在进行的集成 WBF。
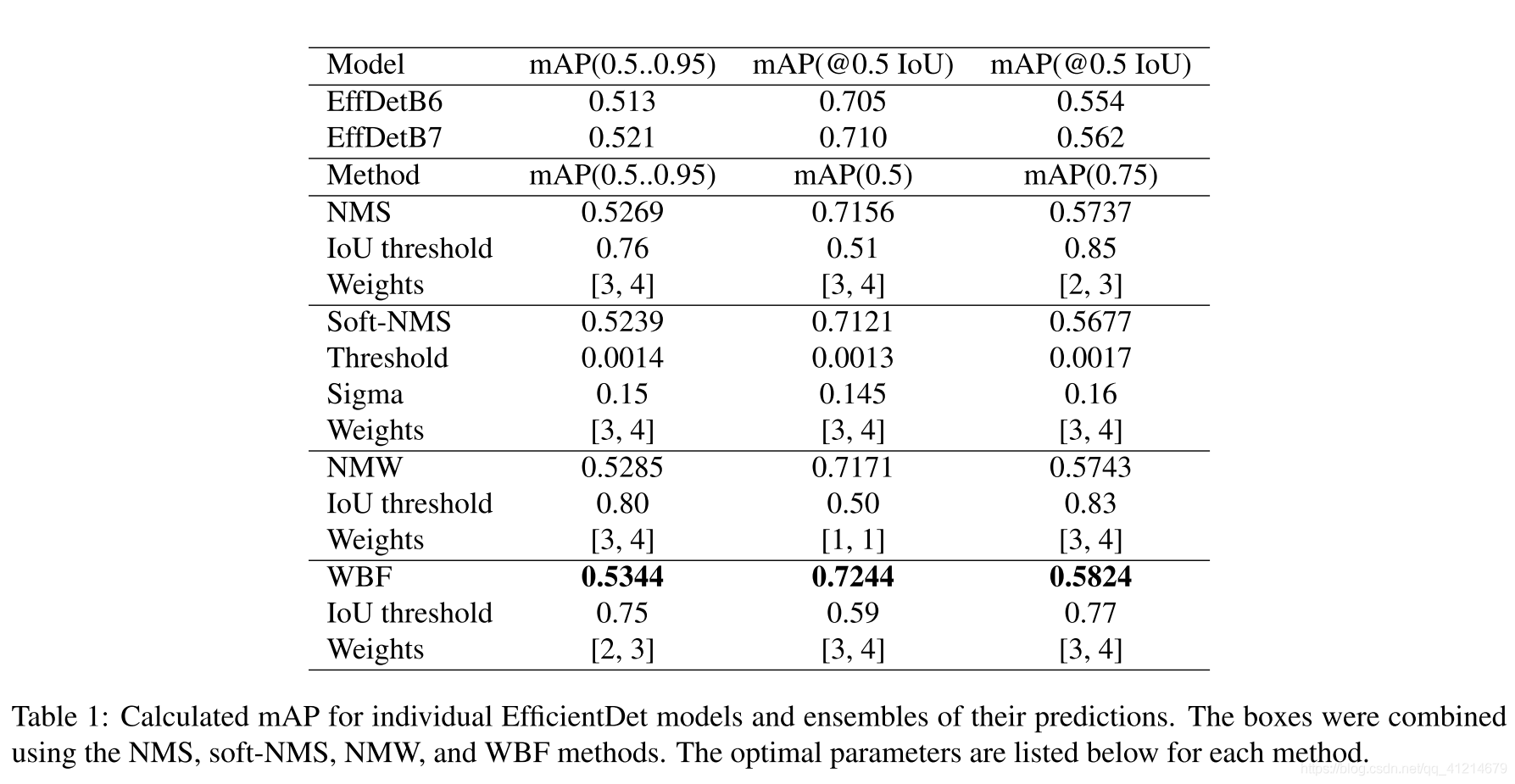
不同后处理的方法对于单一EfficientDet模型的评估结果:
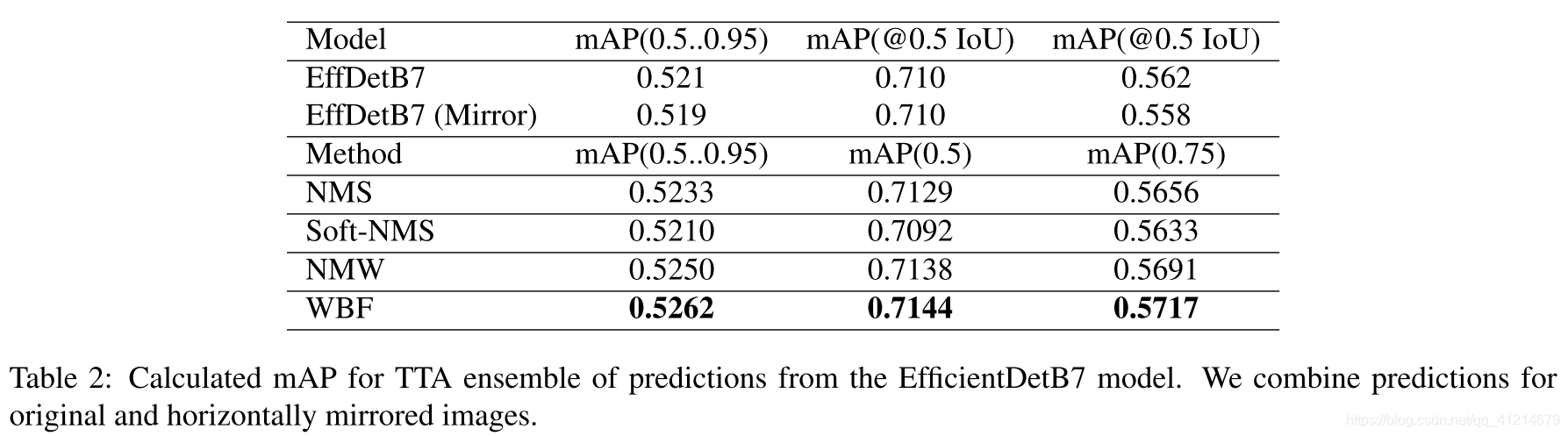
EfficientDetB7模型下,不同后处理对比TTA:
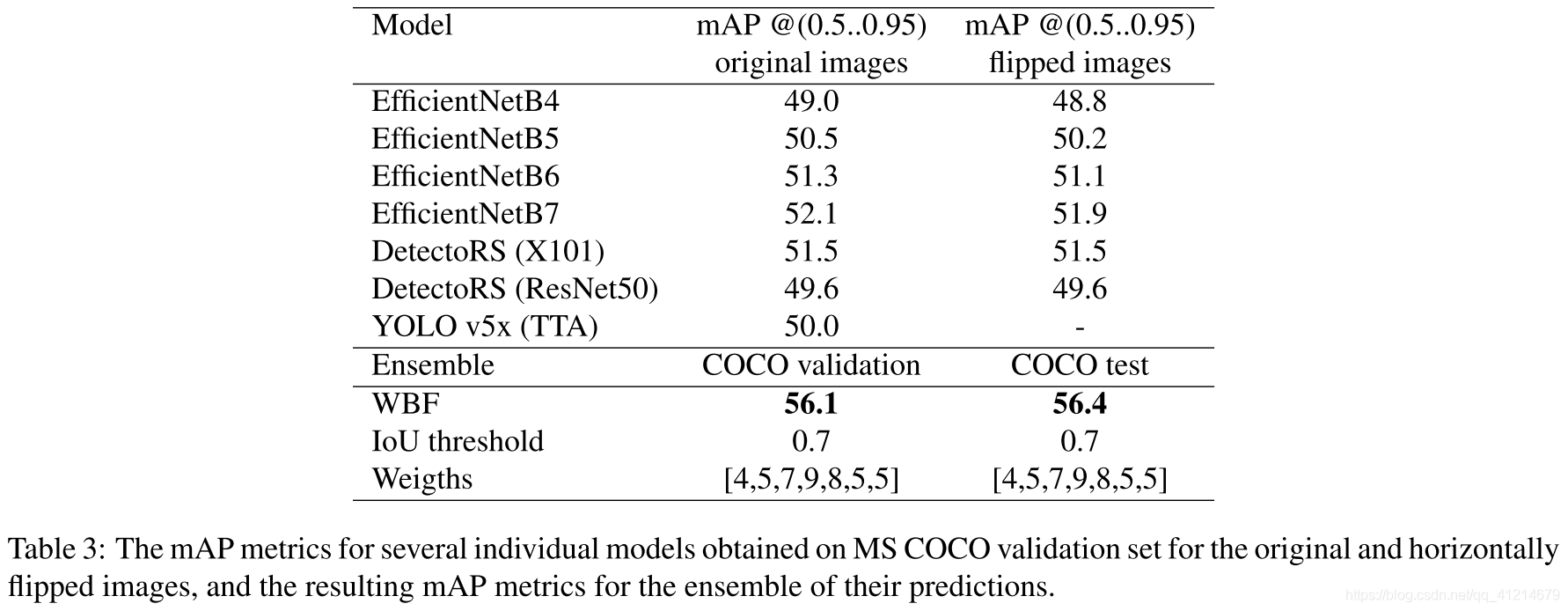
在COCO数据集上,多模型集成:
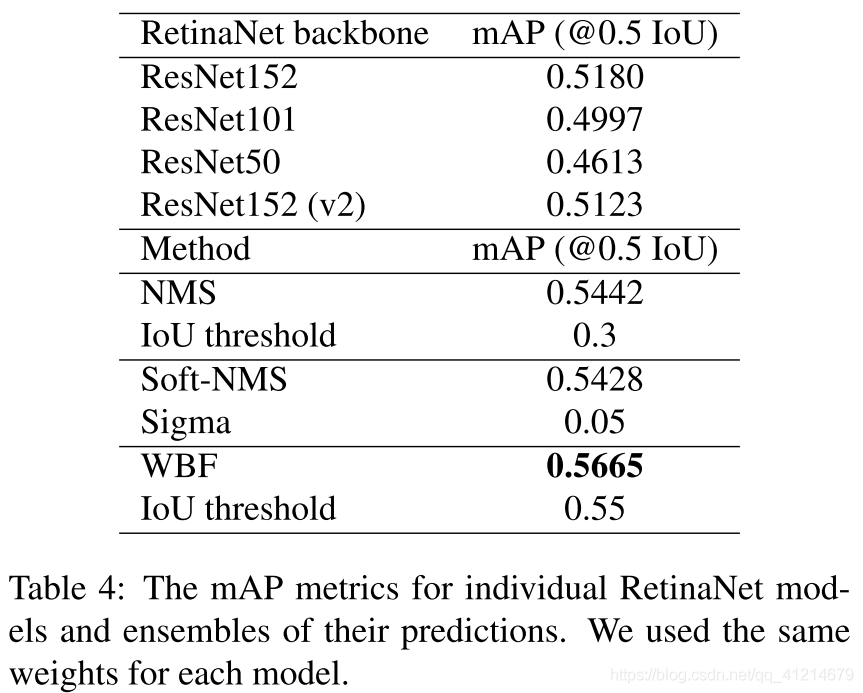
在COCO数据集上,单一RetinaNet模型不同backbone,权重相同:
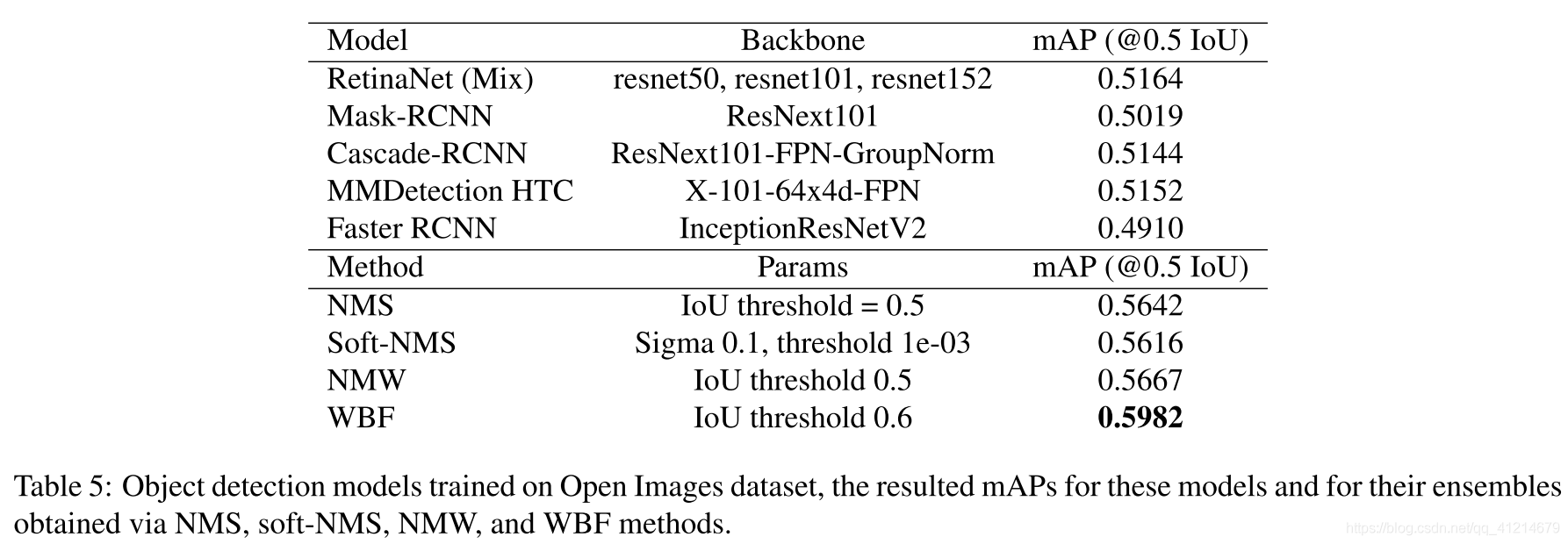
在Open Images数据集上。多模型集成:
如果将检测器中的NMS关闭,直接将输出送入WBF进行处理得到一下结果:
- 原始不经过后处理-mAP:0.1718 (存在大量的重叠框)
- 默认阈值为0.5的NMS-mAP:0.4902 (标准模型输出)
- 优化后的IoU阈值为0.47的NMS-mAP:0.4906
- 优化参数后的WBF-mAP:0.4532 (优化参数:IoU阈值0.43,跳过阈值0.21)
作者认为直接代替NMS效果下降的原因是大量的低置信度的错误预测导致的,而经过NMS后处理后,有效的过滤掉了这些预测,再此基础上,WBF工作更加优秀。
版权声明:本文为CSDN博主「三木ぃ」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qq_41214679/article/details/114689895






