文章目录[隐藏]
1. Object Detection Milestones
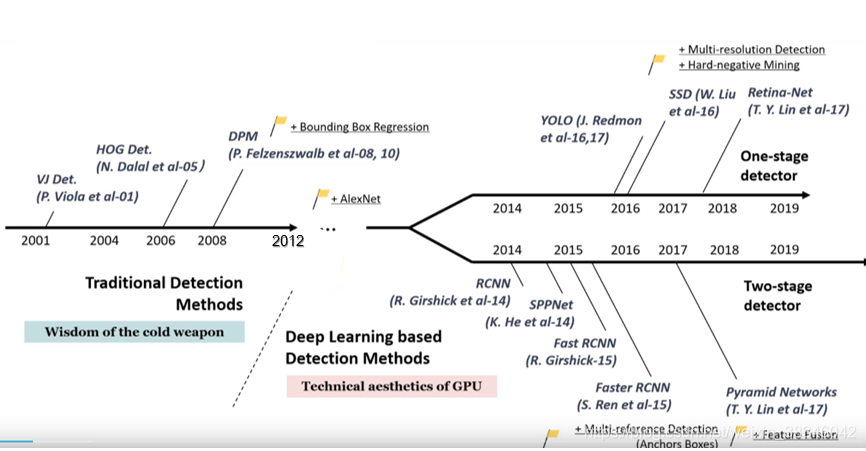
目标检测的里程碑,一个比较大的分野是在2012, 2012年以前是传统目标检测方法,也称为冷兵器时代。2012年以后随着深度学习的发展,尤其是基于深度学习的检测方法,可以使用GPU作为我们的强悍的武器。
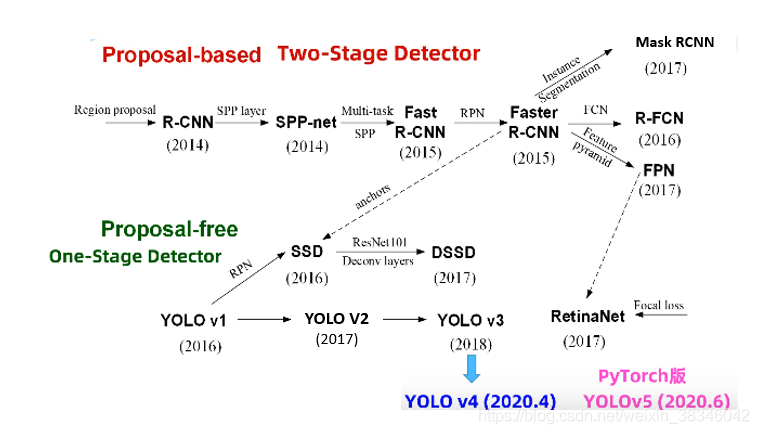
目标检测分为One-stage-detector 和 two-stage-detector,两阶段目标检测器和一阶段目标检测器的区别主要是两阶段检测器提出了proposal(候选框)阶段,在候选框的基础上最终得到物体的预测框。one-stage-detector主要有:YOLO、SSD、Retina-Net; two-stage-detector主要有RCNN、SPPNet、Faster RCNN等
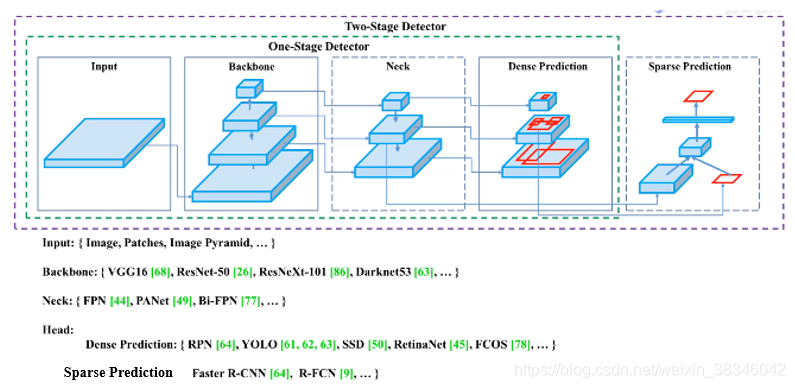
上图是
one-stage-detector和two-stage-detector的网络架构简图:输入图片->Backbone骨干网络->Neck网络进行多尺度特征融合->Dense Prediction or Sparse Prediction
Dense Prediction主要是单阶段检测器所采用的,由于没有候选框提出,所以最后处理的框比较密集
Sparse Prediction主要是双阶段目标检测器,由于提出了候选框,所以最后头部处理框比较稀疏。
版权声明:本文为CSDN博主「@BangBang」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_38346042/article/details/119453702



![[Intensive Reading]目标检测(object detection)系列(十四) FCOS:用图像分割处理目标检测](https://sup.51qudong.com/wp-content/uploads/csmbjc/20200929203851221.png?imageMogr2/thumbnail/!300x300r|imageMogr2/gravity/Center/crop/300x300)


