文章目录[隐藏]
前言
在阅读本博客时,建议先阅读AFDetV1以及cornernet和centernet
AFDetV1在我之前讲解过:【3D 目标检测】AFDet: Anchor Free One Stage 3D Object Detection_JY.Wang_China的博客-CSDN博客
centernet和cornernet的链接在下述:
cornertnet: https://arxiv.org/abs/1808.01244v2
【2D 目标检测】CornerNet: Detecting Objects as Paired Keypoints_JY.Wang_China的博客-CSDN博客
centernet: https://arxiv.org/abs/1904.07850v2
一 核心思路
AFDetV2承接AFDet的一大续作,是Waymo2021的冠军。与V1版本不同的地方主要在于:精简的3D feature extractor、一种improved RPN、新增的两个detect head(分别为IoU-aware confidence score prediction和Keypoints auxiliary supervision)。具体算法流程见下图所示:
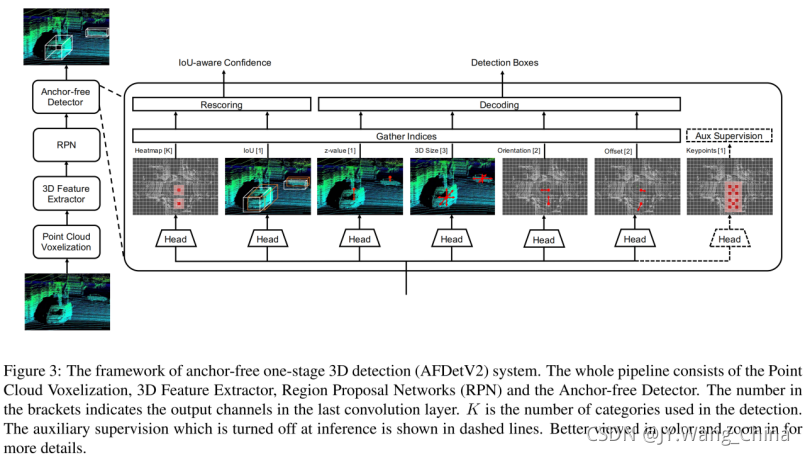
所有的步骤分为:point Cloud Voxelization、3D Feature Extractor、Region Proposal Networks 和 anchor-free detector heads。
二 核心步骤
2.1 Point Cloud Voxelization
与之前第一版不同的是,第二版开始关注提取特征的细节。体素化的方法比较常规,之后生成特征的时候用到GPU加速算法。具体细则还需阅读代码。
2.2 3D Feature Extractor
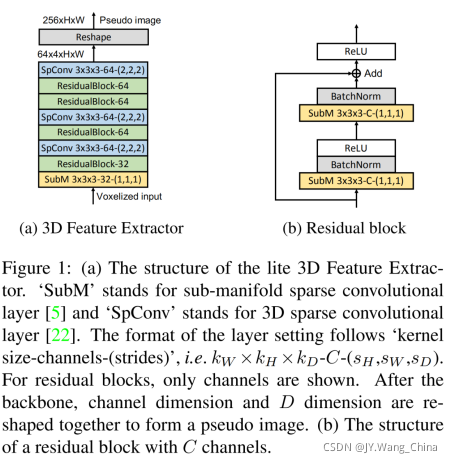
论文中采用3D conv来提取特征。然后在最后一层将z-axis与特征维度进行concatenate操作,得到![]() 的feature map。文章说只在z轴(也就是维度)进行下采样操作,但是看到和维度的stride也是2,可能在代码中与文章有所出入。
的feature map。文章说只在z轴(也就是维度)进行下采样操作,但是看到和维度的stride也是2,可能在代码中与文章有所出入。
2.3 Region Proposal Network
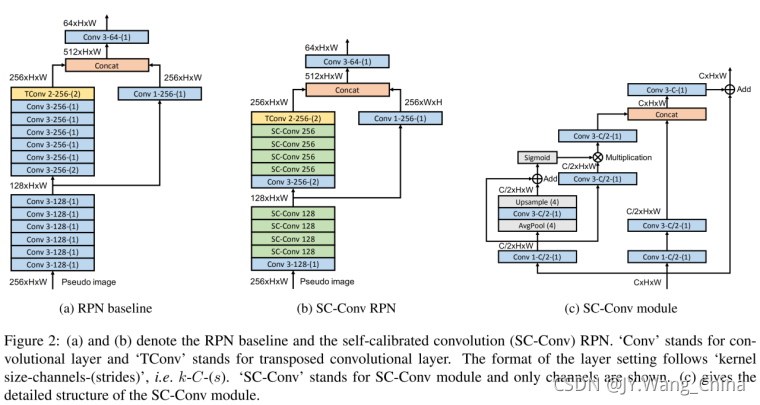
本文采用Fig.2b中的结果来代替original RPN baseline。这有助于扩大对空间位置的receptive field,并引入了channel-wise attention和spatial-wise attention机制。改进的RPN结构在参数数量和计算成本与baseline相似的情况下提高了检测精度。
2.4 Anchor-free Head
除了AFDet中的五个sub-heads外,我们在AFDetV2中设计了两个新的sub-heads,以实现更好的准确性。AFDet和AFDetV2共有的5个sub-heads是the heatmap prediction head、the local offset regression head、the z-axis location regression head、the 3D object size regression head 和 the orientation regression head。新增2个sub-heads为IoU-aware confifidence score、prediction and keypoints auxiliary supervision。
1、Differences of the 5 sub-heads
对于heatmap head,我们通过设置Gaussian半径为2(可以理解为以为中心,向四周扩散的影响力递减。![]() 在作者的实验中用到的是Gaussian kernal),扩展了positive supervision的范围。
在作者的实验中用到的是Gaussian kernal),扩展了positive supervision的范围。
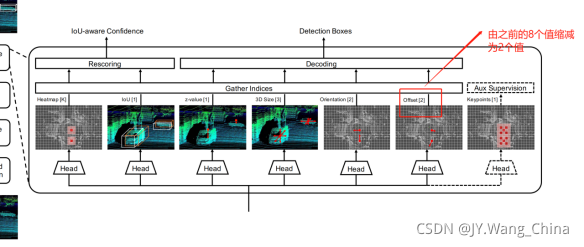
对于orientation regression head,作者将之前的8个预测参数缩减为2个,预测航向角的sin和cos。
2、IoU-aware confidence score prediction
作者提出单一的使用classification score作为最终的prediction score的话,将会有很大一部分classification score不高,但是bbox regression很高的情况被舍弃掉。
因此作者借鉴之前的经验,加了一个sub-head用于预测该pixel预测出的框的IoU,然后使用函数![]() 计算出最终的prediction score。其中是超参数,实验中
计算出最终的prediction score。其中是超参数,实验中![]() 分别对应vehicle、pedestrian和cyclist。
分别对应vehicle、pedestrian和cyclist。
3、Keypoints auxiliary supervision
现在还是不清楚这个的用处,与keypoint heatmap相似,就是Gaussion kernel的半径变成了1。
2.5 Loss
与第一版相同,loss为:
![]()
且在训练时,只反向传播N个foreground 的object。
三 总结
本文是AFDet的第二版,其实作者处理anchor-free的方式就是增加几个sub-head,然后对这几个head进行不同的任务处理,这个做法可以借鉴。
版权声明:本文为CSDN博主「J.Wang_China」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qq_36380978/article/details/120691945






