文章目录[隐藏]
在检测任务中,使用交并比(Intersection of Union,IoU)作为衡量指标,来描述两个框之间的重合度。这一概念来源于数学中的集合,用来描述两个集合
A
A
A和
B
B
B之间的关系,它等于两个集合的交集里面所包含的元素个数,除以它们的并集里面所包含的元素个数,具体计算公式如下:
I
o
U
=
A
∩
B
A
∪
B
IoU = \frac{A\cap B}{A \cup B}
IoU=A∪BA∩B
两个框可以看成是两个像素的集合,它们的交并比等于两个框重合部分的面积除以它们合并起来的面积。
图“交集”中青色区域是两个框的重合面积,
图“并集”中蓝色区域是两个框的相并面积。
用这两个面积相除即可得到它们之间的交并比,如 图1 所示。
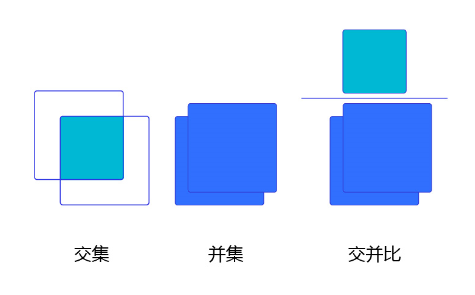
图1:交并比
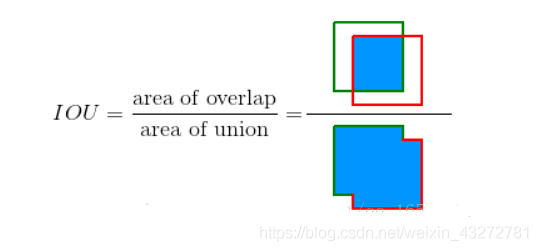
图2:交并比公式
假设两个矩形框A和B的位置分别为:
A
:
[
x
a
1
,
y
a
1
,
x
a
2
,
y
a
2
]
A: [x_{a1}, y_{a1}, x_{a2}, y_{a2}]
A:[xa1,ya1,xa2,ya2]
B
:
[
x
b
1
,
y
b
1
,
x
b
2
,
y
b
2
]
B: [x_{b1}, y_{b1}, x_{b2}, y_{b2}]
B:[xb1,yb1,xb2,yb2]
假如位置关系如 图3 所示:
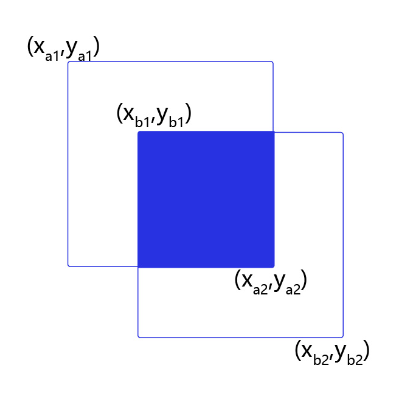
图3:计算交并比
如果二者有相交部分,则相交部分左上角坐标为:
x
1
=
m
a
x
(
x
a
1
,
x
b
1
)
,
y
1
=
m
a
x
(
y
a
1
,
y
b
1
)
x_1 = max(x_{a1}, x_{b1}), \ \ \ \ \ y_1 = max(y_{a1}, y_{b1})
x1=max(xa1,xb1), y1=max(ya1,yb1)
相交部分右下角坐标为:
x
2
=
m
i
n
(
x
a
2
,
x
b
2
)
,
y
2
=
m
i
n
(
y
a
2
,
y
b
2
)
x_2 = min(x_{a2}, x_{b2}), \ \ \ \ \ y_2 = min(y_{a2}, y_{b2})
x2=min(xa2,xb2), y2=min(ya2,yb2)
计算先交部分面积:
i
n
t
e
r
s
e
c
t
i
o
n
=
m
a
x
(
x
2
−
x
1
+
1.0
,
0
)
⋅
m
a
x
(
y
2
−
y
1
+
1.0
,
0
)
intersection = max(x_2 - x_1 + 1.0, 0) \cdot max(y_2 - y_1 + 1.0, 0)
intersection=max(x2−x1+1.0,0)⋅max(y2−y1+1.0,0)
矩形框A和B的面积分别是:
S
A
=
(
x
a
2
−
x
a
1
+
1.0
)
⋅
(
y
a
2
−
y
a
1
+
1.0
)
S_A = (x_{a2} - x_{a1} + 1.0) \cdot (y_{a2} - y_{a1} + 1.0)
SA=(xa2−xa1+1.0)⋅(ya2−ya1+1.0)
S
B
=
(
x
b
2
−
x
b
1
+
1.0
)
⋅
(
y
b
2
−
y
b
1
+
1.0
)
S_B = (x_{b2} - x_{b1} + 1.0) \cdot (y_{b2} - y_{b1} + 1.0)
SB=(xb2−xb1+1.0)⋅(yb2−yb1+1.0)
计算相并部分面积:
u
n
i
o
n
=
S
A
+
S
B
−
i
n
t
e
r
s
e
c
t
i
o
n
union = S_A + S_B - intersection
union=SA+SB−intersection
计算交并比:
I
o
U
=
i
n
t
e
r
s
e
c
t
i
o
n
u
n
i
o
n
IoU = \frac{intersection}{union}
IoU=unionintersection
交并比计算程序如下:
# 计算IoU,矩形框的坐标形式为xyxy,这个函数会被保存在box_utils.py文件中
def box_iou_xyxy(box1, box2):
# 获取box1左上角和右下角的坐标
x1min, y1min, x1max, y1max = box1[0], box1[1], box1[2], box1[3]
# 计算box1的面积
s1 = (y1max - y1min + 1.) * (x1max - x1min + 1.)
# 获取box2左上角和右下角的坐标
x2min, y2min, x2max, y2max = box2[0], box2[1], box2[2], box2[3]
# 计算box2的面积
s2 = (y2max - y2min + 1.) * (x2max - x2min + 1.)
# 计算相交矩形框的坐标
xmin = np.maximum(x1min, x2min)
ymin = np.maximum(y1min, y2min)
xmax = np.minimum(x1max, x2max)
ymax = np.minimum(y1max, y2max)
# 计算相交矩形行的高度、宽度、面积
inter_h = np.maximum(ymax - ymin + 1., 0.)
inter_w = np.maximum(xmax - xmin + 1., 0.)
intersection = inter_h * inter_w
# 计算相并面积
union = s1 + s2 - intersection
# 计算交并比
iou = intersection / union
return iou
bbox1 = [100., 100., 200., 200.]
bbox2 = [120., 120., 220., 220.]
iou = box_iou_xyxy(bbox1, bbox2)
print('IoU is {}'.format(iou))
# 计算IoU,矩形框的坐标形式为xywh
def box_iou_xywh(box1, box2):
x1min, y1min = box1[0] - box1[2]/2.0, box1[1] - box1[3]/2.0
x1max, y1max = box1[0] + box1[2]/2.0, box1[1] + box1[3]/2.0
s1 = box1[2] * box1[3]
x2min, y2min = box2[0] - box2[2]/2.0, box2[1] - box2[3]/2.0
x2max, y2max = box2[0] + box2[2]/2.0, box2[1] + box2[3]/2.0
s2 = box2[2] * box2[3]
xmin = np.maximum(x1min, x2min)
ymin = np.maximum(y1min, y2min)
xmax = np.minimum(x1max, x2max)
ymax = np.minimum(y1max, y2max)
inter_h = np.maximum(ymax - ymin, 0.)
inter_w = np.maximum(xmax - xmin, 0.)
intersection = inter_h * inter_w
union = s1 + s2 - intersection
iou = intersection / union
return iou
bbox1 = [100., 100., 200., 200.]
bbox2 = [120., 120., 220., 220.]
iou = box_iou_xywh(bbox1, bbox2)
print('IoU is {}'.format(iou))
为了直观的展示交并比的大小跟重合程度之间的关系,图4 示意了不同交并比下两个框之间的相对位置关系,从 IoU = 0.95 到 IoU = 0.
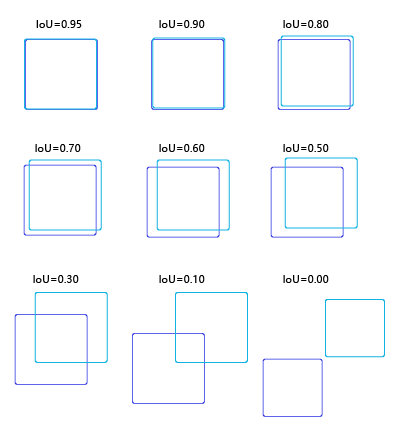
图4:不同交并比下两个框之间相对位置示意图
参考文章
目标检测基础介绍
理解IOU、precision、recall、AP、mAP的含义
IOU计算
版权声明:本文为CSDN博主「Starzkg」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_43272781/article/details/113757298






