文章目录[隐藏]
点云目标检测概述
之前撰写关于点云的相关算法的博客都是如何有效的去除地面点云,得到非地面点云来为后续的检测识别等操作做铺垫。如果你对地面点去除感兴趣的话,可以参考我的之前一些关于点云分割地面的博客。本篇主要介绍一下,在无人车挂载激光雷达的时候,如何有效的识别障碍物的整体流程?当然,这里主要介绍的是传统算法在无人车上对点云数据的操作,深度学习的点云识别后续有机会再详谈。说实话,传统方式的点云目标识别,流程较为复杂,涉及算法较多。从点云接收到输出目标整个流程涉及多个环节与算法。现在,我们先看下面这个流程图,不能算所有的车载传统激光雷达的目标检测流程,也算是一个概括吧。
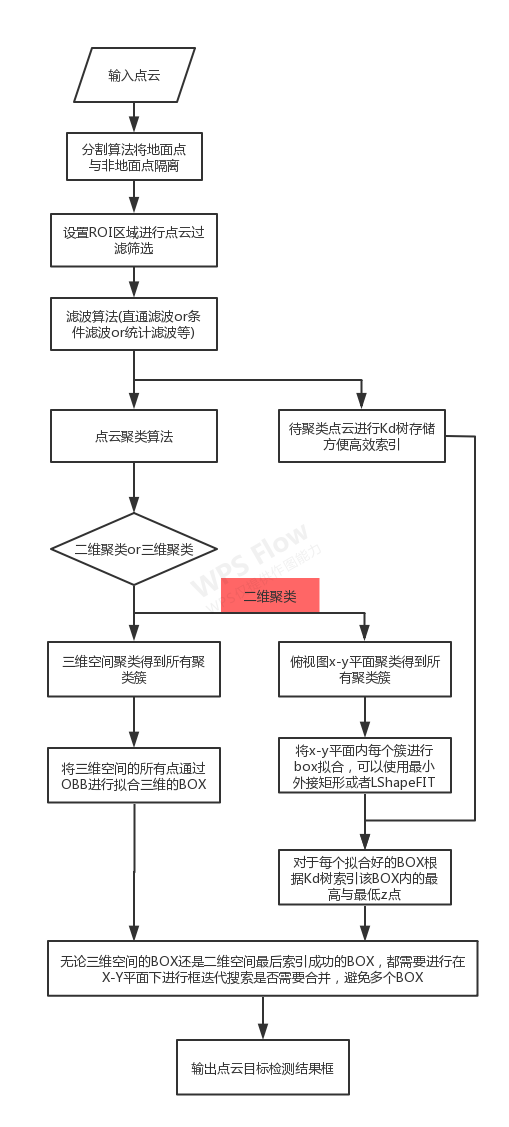
上图是一个传统激光雷达目标检测的大概流程:这里的目标检测基本上是自适应,没有依赖先验信息。这里的先验信息主要是指地图模块给予的道路信息等等。上图主要包含3大模块:
- 点云预处理模块:地面与非地面点云分割、
ROI区域点云获取、相关滤波算法操作; - 聚类算法对预处理后点云进行聚类:2维聚类、或者3维聚类;
版权声明:本文为CSDN博主「AutoSleep」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/Small_Munich/article/details/111991840






