文章目录[隐藏]
- 导读
- 一种常见的基于视觉定位的方法:视觉里程计(Visual Odometry)
- 博视像元高精度主动成像光机OPR407系列,半导体先进封装缺陷检测光学利器--机器视觉网 2023-03-10 11:02:31
- 从“眼力”到“AI”,基于深度学习算法,助力光伏行业的视觉检测革命--机器视觉网 2023-03-10 10:23:33
- 机器视觉在汽车行业机械零部件缺陷检测的应用--机器视觉网 2023-03-10 11:41:40
- 基于线激光的锂电池顶盖平面度在线检测方案,助力锂电生产的质量和稳定性--机器视觉网 2023-03-10 11:30:52
- 使气体转化为可观察、可分辨的图像,高速相机驾驭纹影摄影技术--机器视觉网 2023-03-10 14:03:45
- 适用于安检和工业应用的X射线成像解决方案―新闻频道- 视觉系统设计 2023/3/9 20:15:49
- 计算机视觉硕士,应该选择大厂工作还是读博? 2023-01-31 19:19
- OpenCV Face Recognition – Does Face Recognition work on AI-Generated Images:OpenCV人脸识别–人脸识别对AI生成的图像有效吗 2023-03-09T13:49:55+00:00
- 视觉版ChatGPT来了!吸收AI画画全技能,MSRA全华人团队打造,微软16年老将领衔 2023-03-10 16:02
- 视觉招聘小黑板
导读
一种常见的基于视觉定位的方法:视觉里程计(Visual Odometry)
一种常见的基于视觉定位的方法,通常称为视觉里程计(Visual Odometry),即利用相机从连续的图像帧中提取出特征点,计算相邻图像帧之间的位姿变换,从而实现相机的定位与导航。
在您的方案中,第一步是采集地面图片用于标定,可以采用传统的相机标定方法,通过拍摄不同的图片来获取相机的内外参数。在标定完成后,您可以通过计算两张图像之间的位姿变换来估计小车的运动。
但是需要注意的是,图像匹配和位姿估计的精度与稳定性受到多种因素的影响,例如环境光线变化、摄像头的抖动、场景中遮挡物体等等,因此可能会导致估计出来的位姿存在偏差。针对这些问题,需要采用更加鲁棒的算法和传感器来进行位姿估计,例如使用惯性测量单元(IMU)和全局定位系统(GPS)等辅助设备。
总之,您的方案是可行的,但是需要考虑更多的因素来提高位姿估计的精度和稳定性。
视觉里程计是一种视觉定位方法,用于估计相机或机器人在连续图像帧之间的运动和位置。实现视觉里程计需要软件、硬件和算法的支持。
- 软件: 实现视觉里程计需要使用图像处理和计算机视觉的软件库,例如OpenCV和PCL(Point Cloud Library)等,这些库提供了大量的视觉算法和工具,可以用于图像处理、特征提取、特征匹配、位姿估计等。
- 硬件: 视觉里程计通常需要使用摄像机进行图像采集,因此需要选择合适的摄像机,并考虑其分辨率、采集速度等性能指标。另外,为了保证定位精度和鲁棒性,通常需要使用惯性测量单元(Inertial Measurement Unit, IMU)来辅助定位,IMU可以提供加速度计和陀螺仪等传感器,用于测量机器人的加速度和角速度。
- 算法: 视觉里程计算法通常包括以下几个步骤:
- 特征提取:从图像中提取特征点或特征描述符,例如SIFT、SURF、ORB等;
- 特征匹配:将相邻图像中的特征点或描述符进行匹配,可以使用基于距离或基于几何关系的匹配算法;
- 运动估计:通过匹配点对计算相机或机器人的运动参数,例如基本矩阵、本质矩阵、单应矩阵等;
- 优化:通过非线性优化方法,例如最小二乘法、Bundle Adjustment等,对运动估计进行优化,以提高定位精度和鲁棒性。
常用的视觉里程计算法包括基于稠密光流的算法、基于特征点匹配的算法、基于直接法的算法等。其中,基于直接法的算法可以利用图像的灰度信息直接进行匹配和运动估计,相比特征点匹配算法更加鲁棒。同时,视觉里程计算法通常也需要结合IMU数据进行融合,以提高定位精度和鲁棒性。
总之,视觉里程计的实现需要软件、硬件和算法的支持,开发者需要根据具体应用场景选择合适的工具和算法,并对其进行调试和优化。
除了视觉里程计(Visual Odometry),视觉定位还可以使用以下方法:
- 基于传感器融合的定位方法:将多种传感器(如惯性测量单元、GPS等)的测量数据进行融合,从而得到更准确的位置估计。这种方法可以提高定位的精度和鲁棒性,但需要更多的传感器和计算资源。
- 基于特征点匹配的定位方法:将当前图像中的特征点与参考图像中的特征点进行匹配,根据匹配结果计算出当前位置。这种方法的优点是简单、快速,但对于不同场景和光照条件的适应性较差。
- 基于深度学习的定位方法:使用深度学习算法训练一个神经网络,将当前图像作为输入,输出当前位置的估计值。这种方法的优点是可以自动学习特征,具有较强的泛化能力,但需要大量的训练数据和计算资源。
- 基于SLAM的定位方法:使用SLAM(Simultaneous Localization and Mapping)算法,通过同时进行位置估计和地图构建来实现定位。这种方法的优点是可以同时获得地图信息和位置信息,但对于大规模场景和复杂环境的处理需要更多的计算资源和算法优化。
博视像元高精度主动成像光机OPR407系列,半导体先进封装缺陷检测光学利器--机器视觉网 2023-03-10 11:02:31
2023-03-10 11:02:31 来源: 中国机器视觉网
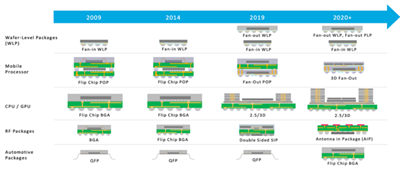
后摩尔定律时代,芯片制程很难从7nm 缩小到更高制程,先进封装是提高封装效率的新途径,通过以点带线方式实现电气互联,实现更高密度集成。SiP及PoP奠定了先进封装时代的开局。
WaferLevelPackaging(WLP,晶圆级封装)、Flip-Chip(倒晶)、3D封装,ThroughSiliconVia(硅通孔,TSV)等出现进一步缩小芯片间连接距离,提高元器件的反应速度。下图是封装主流发展趋势:
更先进的封装技术,意味着更高的工艺和复杂度,也意味着需要更高的质量控制和检测。以Bump为例, Bump高度从200um 降到5um, 一个die超过 25,000 个 bumps 。未来会提升到50-60,000 个bumps .。在整个先
......长按二维码访问原文
从“眼力”到“AI”,基于深度学习算法,助力光伏行业的视觉检测革命--机器视觉网 2023-03-10 10:23:33
从“眼力”到“AI”,基于深度学习算法,助力光伏行业的视觉检测革命
2023-03-10 10:23:33 来源: 中国机器视觉网
随着可再生能源的发展、政策的推动、产业智能化的升级,光伏行业迎来持续稳定的增长。由于行业和产品的特殊性,光伏产品(如光伏组件、太阳能电池片、硅片等)表面裂纹、划痕、断栅、缺角等外观缺陷将直接影响产品的性能和使用寿命,造成潜在风险,这对光伏的生产工艺和质量都提出了更高的要求。如何提高光伏的生产效率和质量、降低生产成本,成为光伏行业面临的重要难题。
案例:硅片分选项目
“我们需要检测硅片表面是否存在缺陷,目前采用的传统算法检测指标不理想、速度较慢,难以满足现阶段我们的检测需求。当前,企业在向智能制造、数字化转型,所以我们正在寻找一种更快、更准、更稳的检测方式,以此达到降本增效…
......长按二维码访问原文
机器视觉在汽车行业机械零部件缺陷检测的应用--机器视觉网 2023-03-10 11:41:40

2023-03-10 11:41:40 来源: 中国机器视觉网
紧固件作为常见的机械零部件,在工作中可能会出现裂纹、腐蚀、凹坑以及人为损伤等缺陷,将严重威胁着现有结构的安全性和可靠性。以汽车为例,串联起汽车关键零部件的紧固件一旦腐蚀断裂失效,轻则汽车故障,重则出现人员伤亡。在这个对紧固件的质量要求日益严苛的时代,高精度检测,已成为紧固件原材料挑选及生产制造的必要工序!
因此,在紧固件厂必要设立表面缺陷检测工位,并安排相应的技术人员,对生产的固件进行表面缺陷检测。那么紧固件表面缺陷种类有哪些呢?其产生的原因以及检测的依据又是什么呢?
紧固件常见缺陷类型及检测要点
汽车零部件-螺栓为例,从设计出图到制品,要经历一系列工艺流程,流程中存在众多复杂因素,极有可能形成某种缺陷,若这些缺陷未被检测发现,或检测手段落
......长按二维码访问原文
基于线激光的锂电池顶盖平面度在线检测方案,助力锂电生产的质量和稳定性--机器视觉网 2023-03-10 11:30:52

基于线激光的锂电池顶盖平面度在线检测方案,助力锂电生产的质量和稳定性
2023-03-10 11:30:52 来源: 中国机器视觉网
由于新能源汽车强势发展、电子产品的升级更新以及政府对于节能环保要求的提高,锂电行业市场空间不断扩大,锂电生产的质量和稳定性成为至关重要的关注点。顶盖的组装是锂电池生产工艺中一道重要工序,为避免出现凸起、凹焊、偏移、翻边等问题,需要在线检测组装过程中顶盖的平面度。
芯歌3D视觉检测锂电池顶盖平面度的成熟方案
检测需求
产品名称:锂电池;检测项目:锂电池顶盖表面平面度;精度要求:±0.01mm。
应用选型
相机型号:sG57N120x085;安装距离:120mm;Z轴量程(F.S.):56mm;X轴宽度(基准):85mm;Z轴线性度:±0.035% F.S.;Z轴重
......长按二维码访问原文
使气体转化为可观察、可分辨的图像,高速相机驾驭纹影摄影技术--机器视觉网 2023-03-10 14:03:45

2023-03-10 14:03:45 来源: 中国机器视觉网
纹影摄影技术是一种经典的流场显示手段,通过纹影仪,该技术可利用光在被测流场中的折射率梯度正比于流场的气流密度的原理,将流场中密度梯度的变化转变为记录平面上相对光强的变化,使可压缩流场中的激波、压缩波等密度变化剧烈的区域转化为可观察、可分辨的图像,进而记录下来。
图 纹影技术试验厂房
在本次实验中,工作人员要拍摄到激光头所射出的气体在不同规格的激光头下射出的形状与流速变化,而由激光头加压后射出的气体因为流速较快,所以需要借助高速相机进行拍摄记录,以便后续分析。
气体状态高速拍摄
拍摄气体:二氧化碳
拍摄气体:压缩空气
拍摄配置
型号:SH6-109-M-160;其他设备:纹影仪;光源:纹影仪自带光源;镜头:300mm变焦镜头;分辨率:
......长按二维码访问原文
适用于安检和工业应用的X射线成像解决方案―新闻频道- 视觉系统设计 2023/3/9 20:15:49

工业CT机和安检机
X射线扫描通常与医学检查相关,但事实上,该技术在其他保障人类安全的行业也发挥着至关重要的作用。例如,X射线机器用于机场行李扫描、食品和药品工厂的生产线,以及对关键的机械元器件进行非破坏性质量控制,如飞机引擎的必备元器件等。
X射线具有辐射性,可观察物体内部。借助该射线,食品质检员和安保人员可以更轻松地发现具有潜在危险性的物质。X射线还可支持精密机械操作,以保障质量。隐藏的缺陷、结构性污染或危险物品都可以监测出来。
艾迈斯欧司朗为工业计算机断层扫描(CT)机和安检机应用提供多种传感解决方案,以实现快速的高精度图像采集,并确保可靠性、高灵敏度和低功耗。在保持最高帧率且无模数转换器(ADC)死区问题出现的同时进行持续集成,可避免充电损失,确保低噪,并以尽可能最低的辐射量进行X射线成像。这显著
......长按二维码访问原文
计算机视觉硕士,应该选择大厂工作还是读博? 2023-01-31 19:19
今年拿到字节AML的offer要比中ICLR的难度大? 做CV的太泛滥了,顶会数量在不断膨胀,个人感觉顶会论文大多类似于思维游戏,可能很多小镇做题家解题解习惯了,比较有成就感,但是很多时候这道题本身就没啥意义。就今年找工作来看,论文的比重已经比较低了,我身边有顶会拿不到字节offer的例子,也有无论文拿到好几个大厂SSP。另外经济下行,以后大厂还有没有研究岗位都无法确定。
个人觉得读博的话要么决定好去学术界发展,要么读博选择应用前景比较广阔的方向,要么选择趁着这个机会润,不然只靠着读博几年发了几篇不痛不痒的所谓顶会,可能出来远远不及在字节特别是AML工作几年的成长。
......长按二维码访问原文
OpenCV Face Recognition – Does Face Recognition work on AI-Generated Images:OpenCV人脸识别–人脸识别对AI生成的图像有效吗 2023-03-09T13:49:55+00:00
As artificial intelligence (AI) technology advances, so does the ability to generate incredibly realistic computer-generated images. This raises an important question: can facial recognition technology work on these AI-generated face images as well as it does on real ones? In this blog post, we’ll explore this question by testing OpenCV Face Recognition, a s
......长按二维码访问原文

视觉版ChatGPT来了!吸收AI画画全技能,MSRA全华人团队打造,微软16年老将领衔 2023-03-10 16:02
明敏 发自 凹非寺
量子位 | 公众号 QbitAI
ChatGPT会画画了!
问它:能生成一张猫片给我吗?
立刻连文带图全有了。
还能根据新的文字指令调整图片:把猫换成狗。
同时也看得懂图、有理解能力。
比如发一张图给它,然后问摩托是什么颜色?它能回答出是黑色。
如上,就是由MSRA资深研究人员们提出的视觉版ChatGPT(Visual ChatGPT)。
通过给ChatGPT结合多种视觉模型,并利用一个提示管理器(Prompt Manager),他们成功让ChatGPT可以处理各种视觉任务。
这项工作一发出来就火了,GitHub揽星已超过1.5k。
简单总结一下,就是把GPT和Dall-E合并的感觉~
又懂文字又会画图……有人就说:
这不
......长按二维码访问原文
视觉招聘小黑板
机器视觉工程师-东莞桥头 03-10 2.5-4万·13薪,东莞
机器视觉算法工程师 03-10 1.2-1.8万·14薪,武汉·洪山区
机器视觉销售经理 03-10 30-60万/年,苏州·工业园区
算法工程师(图形/图像/机器视觉) 03-10 1.3-2万,武汉
视觉算法工程师/机器视觉工程师 03-10 2-3.5万·14薪,合肥·高新区
机器视觉售后工程师 03-10 8千-1.2万,上海·嘉定区
机器视觉FAE工程师 03-10 8千-1.6万,苏州·工业园区
机器视觉工程师 03-10 1-1.5万,上海
光学工程师(机器视觉) 03-10 1.2-2万,深圳·南山区
销售工程师(AGV/机器视觉) 03-10 1-2万·14薪,青岛·崂山区
机器视觉FAE工程师 03-10 8千-1.6万,惠州·惠城区
机器视觉应用工程师 03-10 1-1.8万·14薪,无锡·滨湖区
机器视觉调试工程师 03-10 8千-1.5万,重庆·渝北区
销售工程师(AGV/机器视觉) 03-10 1-2万·14薪,济南·历下区
机器视觉销售工程师 03-10 15-30万/年,苏州·工业园区
机器视觉销售工程师 03-10 7千-1万·13薪,深圳·龙岗区
机器视觉调试工程师 03-10 1.2-1.8万,北京·通州区
销售工程师(AGV/机器视觉) 03-10 1-2万·14薪,长春
机器视觉工程师 03-10 2-2.5万,深圳·宝安区
机器视觉工程师 03-10 10-20万/年,武汉·武昌区
机器视觉调试工程师 03-10 8千-1.5万,长沙·长沙县
销售工程师(AGV/机器视觉) 03-10 1-2万·14薪,沈阳·和平区
机器视觉应用工程师 03-10 1-1.5万,吉安
机器视觉工程师 03-10 1.8-2.5万,珠海·香洲区
机器视觉调试工程师 03-10 1-1.8万,南京·江宁区
销售工程师(AGV/机器视觉) 03-10 1-2万·14薪,苏州·虎丘区
机器视觉应用工程师 03-10 7千-1.4万,苏州
机器视觉工程师 03-10 1.8-2.5万,珠海·香洲区
机器视觉工程师 03-10 1.2-1.8万·13薪,无锡·滨湖区
销售工程师(AGV/机器视觉) 03-10 1-2万·14薪,南通
机器视觉工程师 03-10 1.5-2.5万·14薪,惠州·惠城区
机器视觉算法工程师 03-10 3-6万·13薪,深圳
机器视觉软件工程师 03-10 1.2-1.8万·13薪,上海·浦东新区
销售工程师(AGV/机器视觉) 03-10 1-2万·14薪,无锡·滨湖区
机器视觉工程师 03-10 8千-1.3万·13薪,南京·江宁区
机器视觉应用工程师 03-10 2-4万,深圳·龙岗区
机器视觉调试工程师 03-10 8千-1.5万,成都·龙泉驿区
销售工程师(AGV/机器视觉) 03-10 1-2万·14薪,南京
机器视觉工程师 03-10 2-4万,无锡·梁溪区
机器视觉开发工程师 03-10 3-6万,深圳·龙岗区
机器视觉调试工程师 03-10 8千-1.5万,南昌·西湖区
销售工程师(AGV/机器视觉) 03-10 1-2万·14薪,合肥
机器视觉算法工程师 03-10 1.5-2万,上海·松江区
机器视觉销售经理 03-10 10-18万/年,苏州·吴江区
工业视觉系统销售(机器视觉) 03-10 7千-1.4万,成都·龙泉驿区
销售工程师(AGV/机器视觉) 03-10 1-2万·14薪,常州·天宁区
机器视觉工程师(Halcon+C#) 03-10 1.2-2万,杭州·拱墅区
机器视觉算法工程师 03-10 2-3.5万·13薪,深圳·宝安区
机器视觉方案工程师 03-10 7-9千,无锡·滨湖区
销售工程师(AGV/机器视觉) 03-10 1-2万·14薪,深圳
欲了解详情,请在公众号后台回复:230310





