文章目录[隐藏]
- 导读
- 刚进入大一电气工程自动化专业怎么学好? 2023-08-22 12:01
- 虹科Stratio-beyonsense相机新品,世上首款基于锗可用智能手机无线连接短波红外相机--机器视觉网 2023-08-21 14:06:32
- 嘉励新品21通道多时序控制器,简化操作流程提高检测效率--机器视觉网 2023-08-22 11:41:25
- 如何在机器视觉成像采集中提供高精度光学性能及超高性价比产品——WEETU WT-M系列定距镜头--机器视觉网 2023-08-21 13:51:21
- 三色偏振光源色差检测应用,适用于各种利用偏光消除反光场合--机器视觉网 2023-08-21 13:16:10
- 机器视觉检测与机器视觉定位的区别与应用--机器视觉网 2023-08-22 13:29:03
- 基于机器视觉的纺织物行业织物表面缺陷检测的应用--机器视觉网 2023-08-22 13:20:24
- 它细如发丝,如何检测才能保证采集图像清晰度?--机器视觉网 2023-08-22 11:55:43
- 基于人工智能、深度学习技术的车辆底盘检测--机器视觉网 2023-08-22 15:42:36
- 浅谈相机、处理器、图像传感器未来趋势 2018-11-14 15:24:59
- 机器视觉表面缺陷检测系统设计方案-电子发烧友网 2023-08-21 11:08
- 几种特殊相机有哪些 2022-02-28 07:31:59
- 线阵相机和面阵相机的区别 线阵相机原理技术应用分析图 2022-01-29 16:02:00
- 卷积神经网络用于图像识别的原理 2023-07-19 14:38:25
- 一套简单的机器视觉系统包括哪些部分? 2023-06-29 11:33:33
- 相机传感器-电子发烧友网 2023-08-20
- 机器视觉镜头的基本参数和选用原则-电子发烧友网 2023-08-19 14:28
- 怎样调整工业相机的最低照度与感光度呢?-电子发烧友网 2014-07-22 18:29:33
- Edmund中继镜头―产品聚焦频道- 视觉系统设计 2023/8/21 22:16:54
- 深视智能高速相机助力点胶工艺改进―技术与应用频道- 视觉系统设计 2023/8/21 22:04:45
- 基于自适应多尺度超螺旋算法的无人机集群姿态同步控制 2022-09-22
- 自适应变化响应的动态多目标进化算法 2021-02-05
- “零元购”指向送货机器人!已发生多宗抢劫、盗窃、恶意破坏案件 2023-08-21 19:18
- 起猛了!李白杜甫现场吟诗?这届人形机器人卷疯了 2023-08-22 08:42
- 史上最快拳击机器人!一拳出手,最低延迟12毫秒! 2023-08-22 17:51
- 工业机器人和机械臂的设计、功能和应用有哪些区别 2023-08-22
- MeViS:动作描述引导的视频目标分割数据集 2023-08-21 00:44
- Stanford CS231n 2023 刷课体会 2023-08-21 21:05
- 机器视觉运动控制 2023-08-21 17:54
- 「开发者说」第二期|视觉感知——从2维到N维 2023-08-21 12:45
- 「目标检测简述」DINO 2023-08-21 22:50
- [ICCV2023] 深度均衡目标检测器 2023-08-22 20:39
- AI机器识别突破登Nature封面,加速第四次工业革命,论文一作为浙大校友 2023-08-22 18:06
- TorchSharp BiseNet V2网络实现 2023-08-22 11:31
- 数字图像处理,学完冈萨雷斯的数字图像处理后会变得有多牛13? 2023-08-21 11:29
- DragNUWA:拖拽图像生成视频 2023-08-22 14:52
- 一份高效学习工业3D视觉的学习路线(结构光/机械臂抓取/三维点云/缺陷检测) 2023-08-21 22:37
- AI代码神器火了,复杂操作秒变easy,网友:要抛弃VS Code了 2023-08-21 14:24
- 沙龙招募 | ChatGPT把仿生机器人推到爆发前夜了吗? 2023-08-21 14:24
- <BUG>【OpenCV】图像显示不全_opencv图片显示不全_六月渔烬的博客-CSDN博客 2023-01-27 00:11:46
- 2021全国电设(F题)openmv的图像识别之数字识别_openmv数字识别_王哥来了快跑的博客-CSDN博客 2023-07-20 16:46:27
- Unet++语义分割网络(网络结构分析+代码分析)_unet++网络结构_NukaCC的博客-CSDN博客 2023-03-04 09:33:12
- 图像分割中常用数据集及处理思路(含代码)_ade20k数据集_桑_榆的博客-CSDN博客 2023-04-26 23:45:00
- 计算机视觉基础学习-图像拼接_小夭。的博客-CSDN博客 2022-09-09 16:49:15
- 计算机视觉--距离变换算法的实战应用_是Dream呀的博客-CSDN博客 2023-07-24 15:15:34
- Pytorch深度学习基础 实战天气图片识别(基于ResNet50预训练模型,超详细)_深度学习_day26——使用pytorch实现天气识别_落花雨时的博客-CSDN博客 2022-10-15 10:22:40
- 计算机视觉--利用HSV和YIQ颜色空间处理图像噪声_是Dream呀的博客-CSDN博客 2023-07-26 11:46:40
- 视频实时行为检测——基于yolov5+deepsort+slowfast算法_yolov5视频检测_Yunlord的博客-CSDN博客 2022-10-10 09:30:00
- 视觉识别数字、十字路口和T字路口,巡线于一体的基于openmv的解决方案(2021年电赛f题)_openmv识别路口_Meat_buns_dogs的博客-CSDN博客 2022-08-04 19:02:56
- 睿智的目标检测——Pytorch搭建YoloV7-OBB旋转目标检测平台__白鹭先生_的博客-CSDN博客 2023-03-13 09:52:56
- 【手拉手 带你准备电赛】单色块识别(基于openmv)_openmv识别颜色块原理_一口吞掉小蛋糕的博客-CSDN博客 2022-04-17 12:09:28
- 【学习笔记】Yolov5调用手机摄像头实时检测(环境配置+实现步骤)_窝工昆邪的博客-CSDN博客 2023-03-12 23:05:12
- 从Python到计算机视觉:入门指南_python 视觉_一只贴代码君的博客-CSDN博客 2023-08-18 12:14:47
- 计算机视觉框架OpenMMLab(一):计算机视觉基础_GoAI的博客-CSDN博客 2023-03-06 09:32:55
- 基于OpenCV 的车牌识别_opencv车牌识别_非常颜色的博客-CSDN博客 2023-02-09 10:06:10
- 【OpenCV】 人脸识别_opencv人脸识别_顾城沐心的博客-CSDN博客 2022-11-18 11:55:35
- 使用C++和OpenCV进行人脸识别,包含模型训练与调用过程_人脸识别c++_LewGarben的博客-CSDN博客 2023-05-13 17:35:18
- OpenCV-PyQT项目实战(11)项目案例07:摄像头操作与拍摄视频_opencv 控制摄像头_youcans_的博客-CSDN博客 2023-03-05 10:05:40
- YOLOv8改进损失函数WDLoss:独家更新|即插即用|YOLOv8小目标检测高效涨点2%,改进用于小目标检测的归一化高斯 Wasserstein Distance Loss,提升小目标检测_芒果汁没有芒果的博客-CSDN博客 2023-03-27 11:54:33
- 快速通过pycharm搭建python+opencv实现人脸检测_pycharm人脸识别源码_超561的博客-CSDN博客 2023-01-20 14:01:38
- 基于ENVI软件灰度共生矩阵特征GLCM提取纹理特征_envi灰度共生矩阵_啥都不懂的研究生的博客-CSDN博客 2022-06-09 16:08:41
- 【计算机视觉】图像分割与特征提取——基于Roberts、Prewitt、Sobel算子的图像分割实验_使用sobel 算子的图像分割实验 调入并显示图像;使用sobel算子对图像进行边缘_赵四司机的博客-CSDN博客 2022-11-03 09:41:55
- 【AI数学】相机成像之内参数_相机内参数_木盏的博客-CSDN博客 2023-02-11 15:08:35
- 基于opencv-mediapipe的手势识别_开源手势识别_困了不能睡的博客-CSDN博客 2023-03-01 16:05:17
- Yolov5移植树莓派实现目标检测_树莓派yolo目标检测_爱睡觉的咋的博客-CSDN博客 2022-12-31 09:55:49
- 相机内参标定,相机和激光雷达联合标定_激光雷达相机联合标定_学无止境的小龟的博客-CSDN博客 2022-08-28 13:21:41
- 计算机视觉:场景识别(Scene Recognition)_cv-player的博客-CSDN博客 2023-03-16 15:38:40
- 如何为计算机视觉任务标记图像_贝壳里的海-AI的博客-CSDN博客 2023-07-05 15:39:43
- 利用OpenCV的函数matchTemplate()实现在图像中寻找、检索、搜索模板图像【图像模板匹配】_昊虹AI笔记的博客-CSDN博客 2023-02-24 11:57:47
- 计算机视觉——yolov5回归与跨网格预测、训练技巧(下篇)_yolov5 边框预测_想太多!的博客-CSDN博客 2023-04-19 10:23:54
- 【计算机视觉】新冠肺炎COVID-19 CT影片阳性检测,感染区域分割,肺部分割,智慧医疗实践,医疗影像处理示例_lungmask 镜像_Kim‘s blog的博客-CSDN博客 2022-03-11 15:35:19
- minigpt4搭建过程记录,简单体验图文识别乐趣_submarineas的博客-CSDN博客 2023-04-25 15:38:03
- 7-坐标系及变换_eci坐标系_伊伊_f的博客-CSDN博客 2022-10-09 19:47:02
- RM视觉组考核-装甲板识别(Opencv和C++实现)_晕fufu的小鱼的博客-CSDN博客 2023-01-12 23:00:13
- 使用opencv实现简单的人脸识别_opencv 人脸识别_李招财的猫抓板的博客-CSDN博客 2022-10-18 17:29:41
- FP7195转模拟恒流调光芯片在机器视觉光源的应用优势_pwm转模拟调光_Li_13691661579的博客-CSDN博客 2022-07-30 13:45:32
- 常见摄像头接口USB、DVP、MIPI接口的对比_dvp摄像头_物联网老王的博客-CSDN博客 2023-03-05 16:02:21
- 相机标定-张正友棋盘格标定法_张正友相机标定_呵呜昂黄hj的博客-CSDN博客 2022-05-23 21:36:08
- 【YOLOv8】实战一:手把手教你使用YOLOv8实现实时目标检测_yolo对游戏画面实时检测_virobotics的博客-CSDN博客 2023-04-15 13:29:31
- Autoware1.14-摄像头、激光雷达感知融合_range_vision_fusion_Double lee的博客-CSDN博客 2022-10-18 15:58:11
- 毕业设计-基于机器视觉的水表读数智能识别系统-OpenCV_水表读数自动识别_HaiLang_IT的博客-CSDN博客 2023-01-06 18:30:00
- 2023年目标检测毕业设计(yolov5车辆识别、车辆检测、车牌识别、行人识别)_SYBH.的博客-CSDN博客 2023-03-15 00:32:32
- 【深度相机D435i】Windows+Ubuntu下调用D435i利用Python读取、保存RGB、Depth图片_怎么使用深度摄像头d435_杨立青101的博客-CSDN博客 2022-11-20 20:21:54
- OpenCV实现照片换底色处理_莫浅子的博客-CSDN博客 2023-07-21 07:45:00
- 超简单教你在树莓派上安装opencv(二)_树莓派安装opencv_流 浪 猫的博客-CSDN博客 2022-04-27 23:00:53
- opencv_python的车牌识别_kooerr的博客-CSDN博客 2023-03-15 17:10:55
- 图像缩放_c++ opencv 图片缩放_锡兰_CC的博客-CSDN博客 2023-07-22 10:49:27
- Python+OpenCV实现自动扫雷,挑战扫雷世界记录!_充电君的博客-CSDN博客 2023-07-31 12:16:38
- opencv学习(一)图像的基本操作_cv2.color_bgr2gray_似水不惧的博客-CSDN博客 2023-03-06 15:04:33
- OpenCV-Python学习(21)—— OpenCV 图像几何变换之图像翻转(cv.flip、np.flip)_opencv 图像上下翻转_Rattenking的博客-CSDN博客 2023-02-24 09:00:26
- 【OpenCV】高精度识别圆(支持复杂场景下的圆)_opencv识别圆形_遇见流光的博客-CSDN博客 2022-10-24 00:01:40
- 在PyCharm中搞定python opencv自动补全_pycharm opencv 自动补全_Gaofei1031的博客-CSDN博客 2022-11-14 15:32:09
- opencv的Mask操作,选择图片中感兴趣的区域_computer_vision_chen的博客-CSDN博客 2023-08-02 10:14:45
- 计算机视觉实战--OpenCV进行红绿灯识别_opencv红绿灯颜色识别_是Dream呀的博客-CSDN博客 2023-05-30 15:07:45
- 【opencv+图像处理】(Gui Features in OpenCV) 1-1摄像头:采集摄像头视频,读取视频帧,录制视频_opencv摄像头图像采集并处理图像_cv夏一笑的博客-CSDN博客 2023-05-07 07:15:00
- 图像噪声、去噪基本方法合集(Python实现)_python 图像去噪_Vaeeeeeee的博客-CSDN博客 2023-03-21 23:53:30
- 谈谈如何使用 opencv 进行图像识别_opencv 图像识别_TesterHome官方的博客-CSDN博客 2022-04-25 19:02:08
- Opencv 视频的读取与写入_缺点灵气儿的博客-CSDN博客 2023-08-20 21:12:54
- 基于Opencv的卡尺找线_opencv卡尺工具_一个没有素质的人的博客-CSDN博客 2022-06-24 19:05:21
- 使用Python和OpenCV实现身份证识别_python 证件识别_loriby的博客-CSDN博客 2023-04-05 09:30:00
- 【图像处理】看OpenCV如何实现相机校准_opencv 相机校准_无水先生的博客-CSDN博客 2023-07-04 14:17:51
- python opencv环境配置 保姆级教程_python环境配置opencv_紫金小飞侠的博客-CSDN博客 2022-11-05 14:31:42
- OpenCV获取网络摄像头实时视频流_opencv读取网络摄像头_处女座_三月的博客-CSDN博客 2023-05-13 16:12:30
- 【OpenCV • c++】图像几何变换 2023-07-15 07:42:59
- 基于YOLO目标检测及OpenCV实现的游戏代玩人工智能体(Auto Gaming Agent) [4]_yolo 加什么编译器能自动游戏_陆子祥的博客-CSDN博客 2022-06-16 01:39:26
- (已修正精度 1mm左右)Realsense d435i深度相机+Aruco+棋盘格+OpenCV手眼标定全过程记录_aruco 定位精度_Fr0mdeepsea的博客-CSDN博客 2023-05-12 19:39:01
- 基于OpenCV的人脸识别_爱吃饼干的小白鼠的博客-CSDN博客 2023-03-27 00:28:23
- ROS与opencv的图像转换cv_bridge_ros 转opencv_sicbe559的博客-CSDN博客 2023-01-06 17:35:14
- (九)相机内参、外参、反透视变换python opencv_shiyueyueya的博客-CSDN博客 2023-03-08 17:58:06
- OpenCv-Python学习笔记(九):形态学转换_cv2.erode_笨鸟未必先飞的博客-CSDN博客 2022-03-01 22:11:01
- 【Android App】人脸识别中借助摄像头和OpenCV实时检测人脸讲解及实战(附源码和演示 超详细)_opencv for andriod 人脸识别_showswoller的博客-CSDN博客 2022-12-03 09:31:40
- OpenCV第七篇:车牌识别_opencv车牌识别_苍穹之跃的博客-CSDN博客 2023-02-21 17:33:29
- OpenCV图像特征提取学习四,SIFT特征检测算法_opencv sift_肖爱Kun的博客-CSDN博客 2022-11-27 19:31:41
- 一文带你安装opencv和常用库(保姆级教程少走80%的弯路)_安装opencv库_小叶同学0513的博客-CSDN博客 2023-03-12 22:42:14
- 数字图像处理(入门篇)十四 透视变换_Jackilina_Stone的博客-CSDN博客 2022-12-12 23:10:41
- OpenCV在工业自动化领域的运动控制与仿真_opencv 工业_禅与计算机程序设计艺术的博客-CSDN博客 2023-07-14 02:26:04
- Ubuntu 20.04下搭建C++ & OpenCV 4.6.0 & cmake编译_ubuntu20.04安装opencv c++_s弦风w的博客-CSDN博客 2022-10-13 19:57:22
- 迈德威视MindVision相机配置文件的保存与加载/相机参数移植_洞观视觉的博客-CSDN博客 2023-02-06 15:34:24
导读
刚进入大一电气工程自动化专业怎么学好? 2023-08-22 12:01
上课时间一定要认真听课。不要玩手机,不要玩手机,不要玩手机!!!
重要的事情说三遍,本科阶段能把握这一点就很好了。
不要局限于电气专业内容要怎么学好,电气领域有很多方面,个人觉得首先要掌握基础理论,然后再深入一两项具体的实践就算是学好了。
学生学习一定是最重要的,无论是基础课还是专业课,无论老师讲的好与坏。除了学校课堂外,mooc上有很多课程可以任你挑选。
对于工科学生来说,高数、线代这两门数学课一定要学好,以后你会发现,很多地方都要用到数学基础知识。电气专业课里面电力系统暂态、模电、电力电子这些会比较难,但还是要利用对应课程阶段把它啃下去。
现在所学的觉得没用的知识,不知道到哪天就能帮助你了,到时候再重新去学会很累的,什么阶段做好什么事很重要。
大一大二课余时间可以多出去玩一玩,参加一些感兴趣的社
......长按二维码访问原文
虹科Stratio-beyonsense相机新品,世上首款基于锗可用智能手机无线连接短波红外相机--机器视觉网 2023-08-21 14:06:32

2023-08-21 14:06:32 来源: 中国机器视觉网
什么是短波红外?
在只考虑大气分子吸收时,大气在近红外(780~1000nm)短波红外(1.0~2.5μm)、中波红外(3~5μm)和长波红外(8~14 μm)有4个大气红外“透射窗口”。
短波红外波段与中波和长波相比,波长较短,细节分辨力更好,有利于生成对比度较强的高分辨率图像,其成像效果更接近于可见光图像。
超过750 nm的波长是人眼看不到的,CCD或CMOS相机只能探测到最高约1050 nm的光。而900nm 至 2500 nm 波长范围的光线构成某些应用独有的光学特征,因此,SWIR相机的应用领域可以有更多拓展:例如红外激光分析,探测植物内部的水积聚情况,半导体行业硅产品内部的缺陷,塑料分拣,需要红外光谱的荧光应用,天文、遥感应用
......长按二维码访问原文
嘉励新品21通道多时序控制器,简化操作流程提高检测效率--机器视觉网 2023-08-22 11:41:25

2023-08-22 11:41:25 来源: 中国机器视觉网
上海嘉励最新推出了多时序恒压控制器JL-TSC-21-B-V1。该控制器采用了时序控制技术,最多可支持21个时序,单个时序最大支持21个通道,输出脉宽,时序间隔独立设置。
当控制器接收到启动信号时(无论是外部触发还是软件触发),所有的时序将依次点亮,同步输出信号触发外部相机,实现同步拍照,满足复杂应用场景下,同时控制多组光源分时成像的功能,简化操作流程,提高检测效率。
产品特点
该控制器具有21个时序,可自由设置每个时序的点亮时间以及相邻组合的两个通道的熄灭时间。在点亮时序时,可对21个时序光源进行亮灭调整,进行随意组合搭配。可设置21个通道的亮度值,通过设置不同通道的明暗,打出更具对比性的效果图。在每个时序被点亮时,控制器能够输出信号
......长按二维码访问原文
如何在机器视觉成像采集中提供高精度光学性能及超高性价比产品——WEETU WT-M系列定距镜头--机器视觉网 2023-08-21 13:51:21

2023-08-21 13:51:21 来源: 中国机器视觉网
随着机器视觉的发展,在视觉测量,定位,检测过程中对精度的要求越来越高。镜头图像采集精度越来越受工程师重视。针对实际使用过程中出现的一些使用难点和技术升级需求WEETU凭借对机器视觉行业十多年的技术经验针对性的开发了一系列的镜头产品。WT-M系列镜头又以下产品特性为不同行业应用提供了更高性能且极具性价比的产品,下面对该产品典型的8个性能特性及应用做技术讲解
超低光学畸变
同比远心镜头<0.1%超低畸变光学设计,满足在高精度尺寸测量及高精度定位行业的应用,测量精度和定位精度可达到5um精度内。
全视野分辨率高一致性
在图像采集过程中因为镜头中心和边缘分辨率不一致会导致在测量检测过程中造成精度误差以及精度一致性偏差大的现象。 WT-M系列采用了
......长按二维码访问原文

三色偏振光源色差检测应用,适用于各种利用偏光消除反光场合--机器视觉网 2023-08-21 13:16:10

2023-08-21 13:16:10 来源: 中国机器视觉网
一、背景
随着人们对产品质量要求的提高,色差检测在许多行业中都是至关重要的,特别是在机器视觉成像领域。传统的色差检测方法通常使用白光源,但是它们不能很好地区分出一些微小的色差。为了解决这个问题,三色偏振光源应运而生。
二、产品
三色偏振光源是一款集起偏、检偏于一体的三色光源,RGB三种颜色可单独控制。其主要功能是用作色差检测,也适用于各种利用偏光消除反光的场合,如充电器字符检测、 PCB丝印检测,金属轮廓检测等等。
三、方案介绍
1、创新色差检测方式
利用偏振技术,消除镜面反射 还原产品本色。
采用单色相机加三色光源合成 替代bayer彩色相机
2、偏振光在颜色检测中的作用
利用偏振光技术消除物体表面材 质反光,得到更真实的颜色
......长按二维码访问原文
机器视觉检测与机器视觉定位的区别与应用--机器视觉网 2023-08-22 13:29:03

2023-08-22 13:29:03 来源: 中国机器视觉网
机器视觉检测与机器视觉定位是两种重要的机器视觉应用技术,主要区别在于检测对象和应用领域不同。机器视觉检测技术可以用于检测产品的外观、尺寸、密封性、移动对象、颜色缺陷、形状缺陷等,广泛应用于工业、医疗、电子、农业等领域;而机器视觉定位技术则可以实现对产品的定位和位置信息的获取,广泛应用于工业生产线、医疗器械、电子产品、农业机械等领域。本文对这两种技术的区别和应用进行了探索和总结。
机器视觉检测是指在图像或视频中识别和定位具有特定特征的目标的过程,通常涉及目标识别、目标跟踪、目标分割等任务。它是机器视觉领域中最核心和最基础的技术之一,具有广泛的应用前景。
机器视觉检测技术主要包括以下几个方面:
1、特征提取:通过各种特征提取算法能够从图像或视频
......长按二维码访问原文
基于机器视觉的纺织物行业织物表面缺陷检测的应用--机器视觉网 2023-08-22 13:20:24

2023-08-22 13:20:24 来源: 中国机器视觉网
特征选取依据
通过对待识别的织物产品图像信息识别定位后分割和边缘提取,可以得到图像的原始特征。因此,一般情况下可根据经验和相关理论基础先列出一些可能的特征表,然后用特征排序方法计算不同特征的识别效率,利用结果进行删减,以选取最优的特征组合。
具体地选择特征的依据如下:
1、可区别性:对于属于不同类的图像而言,它们的特征应具有明显的差异 ;2、可靠性:对于同类图像,特征值应该比较接近;3、独立性好:所选择的特征值之间应彼此不相关。需要注意的是,有时相关性很高的特征组合起来可以减少噪声干扰,但它们一般不作为单独的特征使用;4、数量少:图像识别系统的复杂程度随着系统维数(特征个数)成正比增加。特征数量如果过多,虽然识别的效果会更好一些,但是识别时
......长按二维码访问原文
它细如发丝,如何检测才能保证采集图像清晰度?--机器视觉网 2023-08-22 11:55:43
2023-08-22 11:55:43 来源: 中国机器视觉网
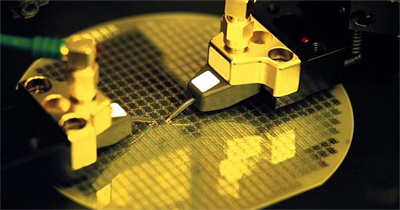
晶圆加工工艺过程复杂,加工过程中的每一步工序质量都需要进行检测,如果缺陷产品流入下一道工序,不仅对产品的整体质量有很大影响,而且会造成生产成本的巨大浪费。为了保证质量的同时提高生产效率,很有必要对晶圆表面缺陷进行快速准确的自动化检测。
由于晶圆表面待检测缺陷非常微小,人眼根本看不到,需要用显微光学系统进行图像采集,而成像系统景深范围小于晶圆表面翘曲,在晶圆表面图像获取时需要通过对焦才能保证图像清晰。在高速检测系统中,为了快速获取晶圆表面清晰图像,需要设计“飞拍自动对焦系统”,既要快速获取晶圆表面图像,又要能测距并自动对焦,这样才能保证了采集图像的清晰度。
测距对焦系统以光谱共焦传感器作为测距设备、以对焦深度法进行清晰成像物距自动标定,可以在飞
......长按二维码访问原文
基于人工智能、深度学习技术的车辆底盘检测--机器视觉网 2023-08-22 15:42:36

2023-08-22 15:42:36 来源: 中国机器视觉网
概述
基于深度学习和人工智能技术的自动化车辆外观/底盘检测,将完整的车辆外观和底盘扫描图像和现有数据库进行比对,可以检测和识别微小的材料磨损、凹痕、异物、结构变形等。
如同所有其它的机器一样,乘用车也需要日常维护。汽车生产商会在整个车辆的生命周期内制定全面的定期维护计划,而在大多数的经销商展厅隔壁都设有专门的服务部门以满足当地车辆的服务需求。随着乘用车的需求量日益剧增,全球汽车销量每年也在不断创下新高,许多家庭都配有一到两辆汽车来满足日常的出行需要。这不仅大大提升了汽车的销量,相应地也增加了服务和维修人员的工作量。故而车主们普遍需提前预约车辆维护和保养。
行业痛点
汽车维修保养的需求在增加,车辆生产商是否在服务部门投入了更多的人力
......长按二维码访问原文
浅谈相机、处理器、图像传感器未来趋势 2018-11-14 15:24:59
工业 相机技术和用于 机器视觉 应用的 图像传感器 的发展——如平板显示器、印刷电路板和 半导体 的检查,以及仓库物流、 智能 运输系统、作物监测和数字病理学——对相机和图像传感器提出了新的要求。其中最主要的是需要在更高分辨率和速度的驱动与更低的功耗和数据带宽之间取得平衡。在某些情况下,也有推动小型化的趋势。
在外部,相机是带有安装功能和 光学 元件的外壳。虽然这对用户很重要,但内部存在影响性能、功能和功耗的重大挑战。 硬件 ,如图像传感器和 处理器 ,以及软件在这里起着关键作用。
根据我们所知道的,我们将在未来十年看到相机、处理器、图像传感器和处理方面的哪些变化呢?它们将如何影响我们的生活质量呢?
图像性能
当您选择一辆新车时,一个尺寸并不适合所有人。图像传感器也是如此。
确实,越来越大、越来越强大
......长按二维码访问原文

机器视觉表面缺陷检测系统设计方案-电子发烧友网 2023-08-21 11:08
1、线阵相机选型
线阵相机是 机器视觉 领域中一种特殊的图像采集设备。由于它的 传感器 只有一行感光元件,因此可以实现高扫描频率和高分辨率。面阵相机在采集运动物体照片时会产生模糊图像,而线阵相机却很好的避免了这种情况。线阵相机的典型应用领域是对金属、塑料、纸和纤维等连续的材料进行采集,被拍摄的物体通常以匀速运动。利用一台或多台相机对其逐行连续扫描,以实现整个表面均匀 检测 。另外由于传感器的高分辨率,线阵相机也非常适合测量场合,它可以准确测量到微米级。
本文根据技术要求及“相机横方向分辨率=横向视野范围大小/相机像素精度”,求得相机横向像素个数需大于 2700,即 4096 个像素。通过以下公式求得了行频参数,
其中 Hc:线阵相机的每线像素数(单位: pi xel),Lo:检测物体的宽幅(单 位:m),
......长按二维码访问原文
几种特殊相机有哪些 2022-02-28 07:31:59

工业 上,除了常见的可见光2D、3D相机外,还有一些特别的相机用于一些特殊应用。
一、 红外 相机
通常情况下,人眼可见范围为390nm-780nm。波长超过780nm判定为红外光。 红外光一般分为近红外NIR、短波红外SWIR、中波红外MWIR、长波红外LWIR、 微波 。
红外相机-NIR NIR(近红外)是肉眼不可见的电磁波谱的一部分,NIR的成像并不依赖于颜色,所以可以 高精度 地可视化任何物体。 NIR光的波长比可见光长,这通常意味着光更容易通过纸张、布料和塑料等材料透射。近红外波长对材料和涂层的反应也与可见光不同。 NIR可以做到:
更容易穿透材料
降低成像对象的颜色饱和度
消除不必要的眩光和反射
忽略各种 检测 应用中不需要的细节
红外相机-SWIR 短波红外(SWIR)的范围在1
......长按二维码访问原文
线阵相机和面阵相机的区别 线阵相机原理技术应用分析图 2022-01-29 16:02:00
近几年,随着线阵相机的普及,更多的行业,在 机器视觉 应用方案中,使用线阵相机。
线阵相机的优势很突出,困难也很突出 — 开发和部署,比面阵相机更复杂。
这篇文章,把线阵相机的相关基础知识,做了一个总的梳理和归纳,希望对使用线阵相机的您,有所助益。
1
为什么会需要线阵相机?
客户使用线阵相机的原因、场景很多,总结起来,基本是下面三个因素:
a.被拍摄物的特殊性
• 运动着的,无限长的被拍摄物,如布匹、钢带、薄膜材料、纸张
• 传送带上大小,颜色、分布各异的 产品 :果蔬、矿石、金属零件等
• 圆柱形物体:易拉罐、滚筒装置
b.对光的均匀性,要求很高
• 线阵光源比面阵光源,更容易实现打光的均匀性
c.成本考量
• 1台线阵相机 vs 多台面阵相机:成本更低,部署更方便。
• 线阵相
......长按二维码访问原文
卷积神经网络用于图像识别的原理 2023-07-19 14:38:25

图像识别是非常有趣和具有挑战性的研究领域。本文阐述了卷积 神经网络 用于图像识别的概念、应用和技术。
什么是图像识别,为什么要使用它?
在 机器视觉 领域,图像识别是指软件识别人物、场景、物体、动作和图像写入的能力。为了实现图像识别,计算机可以结合 人工智能 软件和摄像机使用机器视觉技术。
虽然人类和动物的大脑很容易识别物体,但计算机在相同的任务中却遇到了困难。当我们看着像树木、汽车或朋友的东西时,我们通常不需要有意识地去学习后才能判断它是什么。然而,对于计算机,识别任何东西(无论是钟、椅子、人类或动物)都是一个非常困难的问题,并且为该问题找到解决方案的风险非常高。
图像识别是一种 机器学习 方法,其设计类似于人类大脑的功能。通过这种方法,计算机可以识别图像中的视觉元素。通过依靠大型数据库和注意显露模式
......长按二维码访问原文
一套简单的机器视觉系统包括哪些部分? 2023-06-29 11:33:33
相关推荐
机器视觉系统包括哪些 机器视觉系统包括哪些 机器视觉系统就是利用机器代替人眼来作各种测量和判断。它是计算机学科的一个重要分支,它综合了光学、机械、电子、计算机软硬件等方面的技术,涉及到计算机、图像处理、模式识别、人工智能 2023-06-29 11:33:33 92
机器视觉系统集成的关键要点有哪些? 准确地描述机器视觉系统需要完成的功能和工作环境,对于整个机器视觉系统的成功集成是至关重要的。 2023-04-19 15:04:44 115
机器视觉系统图像采集卡是什么? 一般来说,机器视觉系统包括了照明系统、镜头、摄像系统、采集卡、图像处理卡和图像处理系统。对于每一个应用,我们都需要考虑系统的运行速度和图像的处理速度、使用彩色还是黑白摄像机、检测目标的尺寸还是检测 2023-04-06 17:
......长按二维码访问原文
相机传感器-电子发烧友网 2023-08-20
文章:12个 浏览:4345次 帖子:1个
哈苏的中画幅原先是指其V系(比较有名的是503CW)所用的120胶片,现在中画幅则是指使用与120胶片相同尺寸。或是比起35mm全片幅较大的感光元件(并...
仅靠偏振滤镜是无法消除金属表面的反光的!在金属表面上,光没有偏振,只是反射。因此,尽管有偏振相机,但根据应用情况,绝对有必要在照明上安装一个额外的偏振滤...
一套最简单的机器视觉系统包括:视觉成像部分、图像处理部分、运动控制部分。
相机传感器资讯
Socionext图像处理技术可校正功能提升视频画质 日前,SoC设计与应用技术领导厂商Socionext Inc.(以下“Socionext”) 宣布荣获美国国家电视艺术与科学学院(NATAS)颁发的第... 2022-05-06 标签:视频图像处理器相
......长按二维码访问原文
机器视觉镜头的基本参数和选用原则-电子发烧友网 2023-08-19 14:28
基本参数
镜头的主要参数有焦距、分辨率、工作距离、景深、视野范围、畸变量等。
分辨率:指在像面处镜头在单位毫米内能够分辨的黑白相间的条纹对数,受镜头结构、材质、加工精度等因素的影响。下图的分辨率为1/2d,其中,d为线宽。分辨率的单位为lp/mm(线对/毫米)。镜头和相机的分辨率影响最终成像的质量。
工作距离:一般指镜头前端到被测物体的距离,小于最小工作距离、大于最大工作距离的系统一般不能清晰成像。
景深:以镜头最佳聚焦时的工作距离为中心,前后存在一个范围,在此范围内镜头都可以清晰成像。景深受焦距和光圈的影响:镜头的焦距越短,景深的范围就越大,光圈越小,景深就越大
视野范围:图像采集设备所能够覆盖的范围,即和靶面上的图像所对应的物平面的尺寸。
焦距:镜头焦距与凸透镜的焦距概念略有不同,因为镜头是多个
......长按二维码访问原文
怎样调整工业相机的最低照度与感光度呢?-电子发烧友网 2014-07-22 18:29:33
工业 相机的最低照度与感光度怎么调整? 机器视觉 系统是指用计算机来实现人的视觉功能,也就是用计算机来实现对客观的三维世界的识别。机器视觉系统主综合了 传感器 、相机、软件和 硬件 ,保证机器能够清楚“看到”生产过程。因而,机器视觉系统被用于检验生产过程的自动化,并能保证与生产线的进度一致。通常用于生产线的末端, 检测 合格 产品 的通过。本文主要带大家了解下相机的最低照度和感光度。
最低照度是测量摄像感光度的一种方法,换句话说,摄像机能在多黑的条件下看到可用的影像。但是因为没有管理的标准,因此第个大型CCD制造商都有自己测量CCD感光度的方法。较常用的测量最低照度的方法称为目标照度法,目标照度表示有多强光线到达CCD表面放置。尽管清晰的定义不同,然而有三项主要的参数决定结果。就是:
F值 (用来测试摄像机
......长按二维码访问原文
Edmund中继镜头―产品聚焦频道- 视觉系统设计 2023/8/21 22:16:54

C-接口消色差双合透镜
备有C-接口设计以轻易与成像应用集成
备有集成的光圈以提升对光通量的控制
非常适用于中续和投影应用
TECHSPEC® C-接口消色差双合透镜设计用于与一广泛系列的OEM应用进行集成。TECHSPEC® C-接口消色差双合透镜充分地利用了一个集成的光圈,非常方便用户对其数值孔径以及焦点深度进行调整。每个透镜都经过定向优化,以最大化其系统性能。其铝制外壳也消除了使用散装光学元件所存在的风险,而宽带可见镀膜透镜则为广泛的光谱区域提供高透射率以及低反射损耗的优势。
通用规格
产品型号
技术数据
带封装的消色差成对套件
15mm 和 30mm 直径选项
AR 镀膜镜片
我们的15.0mm和30.0mm带封装消色差成对套件将备受青睐的TECHSPEC®消色差透镜合并到中继及投
......长按二维码访问原文
深视智能高速相机助力点胶工艺改进―技术与应用频道- 视觉系统设计 2023/8/21 22:04:45
随着越来越多的电子产品走进人们的工作和生活,大量的电子元件也被生产和使用,而在电子元件的生产过程中,点胶就是一个非常重要的工序,其通过点胶机对胶水等流体进行控制,能在设定的时间内将流体点滴、涂覆于产品的表面或内部,实现精准点胶和控胶。
无接触式的滴胶泵通过将压缩空气送入胶瓶(注射器),把胶体压进与活塞室相连的进给管中,并在此进行加热及控温,以达到最佳且稳定的粘性。当活塞处于上冲程时,活塞室中填满胶体,当活塞向下推进滴胶针头时,胶体从针嘴喷射出,滴到产品上形成胶点效果。
滴出的胶量由活塞下冲的距离决定,可通过手工调节或编程操控,但在点胶过程中可能发生出胶量过多或者过少,形成胶点不规范的情况,因此需要通过高速相机记录其点胶过程,从而调节设备的相关参数。
拍摄配置
型号:SH6-113-M-40
光源:20
......长按二维码访问原文
基于自适应多尺度超螺旋算法的无人机集群姿态同步控制 2022-09-22
摘要: 四旋翼无人机(Unmanned aerial vehicle, UAV)系统姿态角和角速度分别为运行在不同时间尺度上的慢、快动态. 由于输入扰动的上界难以精确估计, 本文提出一种基于自适应多尺度超螺旋(Super-twisting, STW)滑模算法的无人机集群一致性控制策略. 首先, 建立无人机集群系统的姿态角模型, 并通过奇异摄动理论将其化为两时间尺度形式. 基于系统的快慢特性, 本文设计两时间尺度的超螺旋滑模算法, 并采用自适应增益处理无人机集群系统的未知边界非线性. 此外, 还提出一种改进型自适应多尺度超螺旋滑模算法, 进一步减少系统的一致性收敛时间, 实现无人机集群姿态角有限时间内同步. 最后通过仿真分析, 验证两种自适应多尺度超螺旋算法的正确性和有效性.
......长按二维码访问原文
自适应变化响应的动态多目标进化算法 2021-02-05
摘要: 动态多目标优化问题(Dynamic multi-objective optimization problems, DMOPs)的目标函数发生变化时, 需要采取变化响应策略对种群进行重新初始化, 以快速追踪新环境中的最优解集. 现有动态多目标优化算法对不同个体、不同维度的决策变量缺乏针对性的变化响应, 导致重新初始化效果尚存在较大改进空间. 为此, 提出一种对不同个体、不同维度的决策变量分别进行自适应变化响应的动态多目标进化算法(Dynamic multi-objective evolutionary algorithm with adaptive change response, DMOEA-ACR). 该算法包括两个核心部分: 1)对$t $时间步最优种群和$t-1 $时间步最优种群中对应个体各维度决
......长按二维码访问原文
“零元购”指向送货机器人!已发生多宗抢劫、盗窃、恶意破坏案件 2023-08-21 19:18
“零元购”指向送货机器人!已发生多宗抢劫、盗窃、恶意破坏案件
通过配送机器人送餐送货是高效、快速地将物品送到顾客手中的好办法,但在过去几年,餐馆和其他企业使用的送货机器人被盗窃和破坏的事件屡见不鲜,尤其是在拥有“零元购文化”的美国。
洛杉矶抢劫、偷窃机器人货物频发
洛杉矶电视台最近报道了西好莱坞发生的多起机器人盗窃和破坏事件,一些正在运送的货物或者食物机器人被抢。盗窃和破坏行为事件不断出现在TikTok等社交媒体上,视频中有的人强行打开机器人货仓门,取走里面正在运输的货物或者食物,也有的人故意破坏机器人,对其拳打脚踢。
为了稳住用户,机器人公司为供应食品的企业提供了补偿,位于好莱坞的Blu Jam咖啡馆的总经理Steve Avila说:“我们必须重新制作食物,但幸运的是我们仍然得到了报销,我可以看到送货
......长按二维码访问原文
起猛了!李白杜甫现场吟诗?这届人形机器人卷疯了 2023-08-22 08:42
起猛了!李白杜甫现场吟诗?这届人形机器人卷疯了
今年的世界机器人大会,绝对是“人”多势重!
8月16日,2023世界机器人大会在北京隆重举行。作为机器人领域的年度盛会,今年更是星光熠熠,云集了近160家国内外机器人企业,近600件机器人产品“集结成军”,科技之光闪耀北京。
“这是人形机器人数量最多的一届展会,几乎所有做人形机器人的厂商都来参展了”
在众多展品中,要论“抢镜”,人形机器人毫无疑问将拔得头筹:它们中有仿佛穿越时光而来吟诗作赋的“李白”“杜甫”;有的会唱歌跳舞;有的会写字绘画;有的现场投篮、翻跟斗大秀绝活;能化身“咖啡师”“烘焙师”,化身贴心管家……更有不少新品首发,红杉种子选手——宇树智能首款通用人形机器人H1和小米更“狗”的机器人,“铁蛋2”也首次在公众面前实机亮相。
人形机器人以其越发
......长按二维码访问原文
史上最快拳击机器人!一拳出手,最低延迟12毫秒! 2023-08-22 17:51
史上最快拳击机器人!一拳出手,最低延迟12毫秒!
你是否想过人类和AI通过机器人在擂台上大打出手?
在电影《铁甲钢拳》的最后一场战斗中,两个巨型机器人在拳击场上展开殊死搏斗。令人意外的是,其中一个机器人却是由人类操控,只见他腾空跃起、猛地出拳,机器人“砰”地一声,几乎零延迟地完美模仿他的动作,快速向对面挥出重拳。
如今这一场景由山东的奇波机器人公司复现了。演示视频一经发布,就让无数网友惊呆了下巴,让人直呼“电影照进现实!”目前视频已在B站累计获得60万播放和3.2万点赞,对于受众面较窄的来说,这个数据已是一份不错的成绩单,可以跻身科技“小烫门”。
这台能模仿人类真实战斗动作,进行快速打击的遥控机器人名叫QIBBOT。令人意外的是,如此炫酷的机器人,来自中国制造,研发团队加上顾问也仅仅只有三人,不仅团队规
......长按二维码访问原文
工业机器人和机械臂的设计、功能和应用有哪些区别 2023-08-22
工业机器人和机械臂的设计、功能和应用有哪些区别?
机械臂是一种由多个关节连接而成的机械结构,类似于人的胳膊。它通常具有可旋转或可伸缩的关节,使其能够在空间中执行精确的定位和操作。机械臂通常由电机、传感器、控制系统和执行器组成。工业机器人是一种自动化设备,专门用于在工业生产线或其他工业环境中执行各种操作任务
......长按二维码访问原文
MeViS:动作描述引导的视频目标分割数据集 2023-08-21 00:44
点击@CV计算机视觉,关注更多CV干货今天跟大家分享一个新的语言引导视频分割数据集,该工作最近公布在Arxiv上。
1.动机
语言引导视频分割通常被认为是半监督视频目标分割的一个分支任务,近年来被广泛关注。当前常用的数据集更关注静止的显著性目标,这类目标对应的语言描述通常是静态的属性信息,比如物体颜色等,这类信息完全可以在单帧图片中观察到。
作者更关注视频中目标的动态运动信息,探索利用运动信息描述来引导视频中运动目标的分割,因此提出了一个新的大规模数据集 Motion expressions Video Segmentation(简称MeViS)。该数据集包含2006段视频,8171个目标,28570个运动描述。
2.方法
(1)视频收集
作者从公开的、具有高质量mask标签的视频分割数据集中收集满
......长按二维码访问原文

Stanford CS231n 2023 刷课体会 2023-08-21 21:05
2023年3月左右,笔者刷了这门课的2022版,但8月再来看2023版却又有不一样的体会,因此写了这篇博客。这门CS231n也是我个人在自学名校公开课当中体验最好的一门,其slide与note包括assignment的引导上都写的十分精彩,可见飞飞实验室团队在这门课上投入了多大的心血。 这门课以视觉为主体作为DL的入门课,是因为视觉的输入“张量”(tensor,可能在数学上并不准确),大多是非常直观的三通道二维数组的形式,既直观、在矩阵运算上也显得自然,因此在教学方面更加有利于直觉层面上的引导,以便于之后更加深入的学习。 本文将对学习这门课的预备工作、内容介绍、作业介绍、近些年的改动上做一些描述,也会对于学习这门课的方法上提供一点个人微薄的见解。
1.预备知识
机器学习:个人认为对于学习周期较长的人来说最好
......长按二维码访问原文
机器视觉运动控制 2023-08-21 17:54
近年来随着科学技术的进步,人工智能飞速发展。而视觉技术作为人工智能领域的一个分支,也随之发展,各行各业也渐渐开始进行技术变革。一些传统的需要人工检测的行业,开始逐渐采用自动化的智能检测方式。比如,使用相机代替人眼去观察检测的对象;采用程序算法来模拟人的意识进行判断,针对图像信息进行分析推理,得到图像处理结果。
马克拉伯免费的机器视觉软件SGVision与深度学习平台全力支持机器视觉自动化检测行业的发展,为工业自动化提供机器视觉解决方案。
一个完整的机器视觉系统由多个模块组成,一般包括光学系统(光源、镜头、相机)、图像处理系统, 交互界面等。基于机器学习和推理的视觉系统的性能,也可以通过增加运动控制来进一步提高。机器视觉运动控制是指通过使用摄像头和图像处理算法来实现对机器运动的控制。在这个过程中,摄像头会捕捉
......长按二维码访问原文
「开发者说」第二期|视觉感知——从2维到N维 2023-08-21 12:45
纯视觉BEV下的无高精地图城区NoA https://www.zhihu.com/video/1676933017552228352
纯视觉BEV下的无高精地图城区NoA
视觉道路语义分割 https://www.zhihu.com/video/1676934487701889024
视觉道路语义分割
纯视觉3D占用栅格 https://www.zhihu.com/video/1676934604160913409
纯视觉3D占用栅格
开发者说:大家好,我是视觉算法组的钟同学,我的家乡是以风筝闻名的鸳都山东潍坊,欢迎大家来支持当地旅游业的发展。工作之余我会抽时间打打篮球、逛逛各种展览,有共同爱好的朋友欢迎结伴出行。
本次内容将会用大致三个部分来介绍视觉感知算法团队在视觉感知领域的一系列探索
......长按二维码访问原文
「目标检测简述」DINO 2023-08-21 22:50
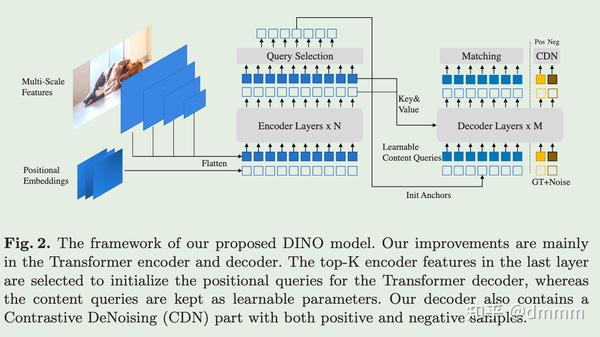
论文链接:DINO: DETR with Improved DeNoising Anchor Boxes for End-to-End Object Detection
论文代码:IDEA-Research/DINO: [ICLR 2023] Official implementation of the paper "DINO: DETR with Improved DeNoising Anchor Boxes for End-to-End Object Detection" (github.com)
Motivation
DETR这类方法在COCO的榜单中仍打不过Anchor-based的方法
DINO是一篇在DAB-DETR和DN-DETR的基础上加入了3个tricks方法来打榜的论文。
Main
......长按二维码访问原文
[ICCV2023] 深度均衡目标检测器 2023-08-22 20:39
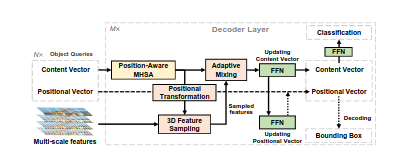
本文介绍深度均衡目标检测算法DEQDet,发表在ICCV2023上。
论文链接
一. 研究动机
目标检测是计算机视觉中的一个基础任务,从DETR开始,当前主流的基于Query的目标检测器通过将图片中的object instances表示为一系列的可学习Query。之后通过stack起来的多层不共享参数的解码器层对可学习Query进行微调(refinement),即通过Attention或者MLPMixer将采样的图像特征融合到Query中,最终得到稳定的object instances表示,这些表示可以通过FFN解码为object的类别和包围框信息。
虽然基于Query的目标检测范式取得了不错的结果,但是其设计范式中仍旧存在着一些问题:
参数冗余性:每一层decoder layer用不同的参数做着同样
......长按二维码访问原文
AI机器识别突破登Nature封面,加速第四次工业革命,论文一作为浙大校友 2023-08-22 18:06
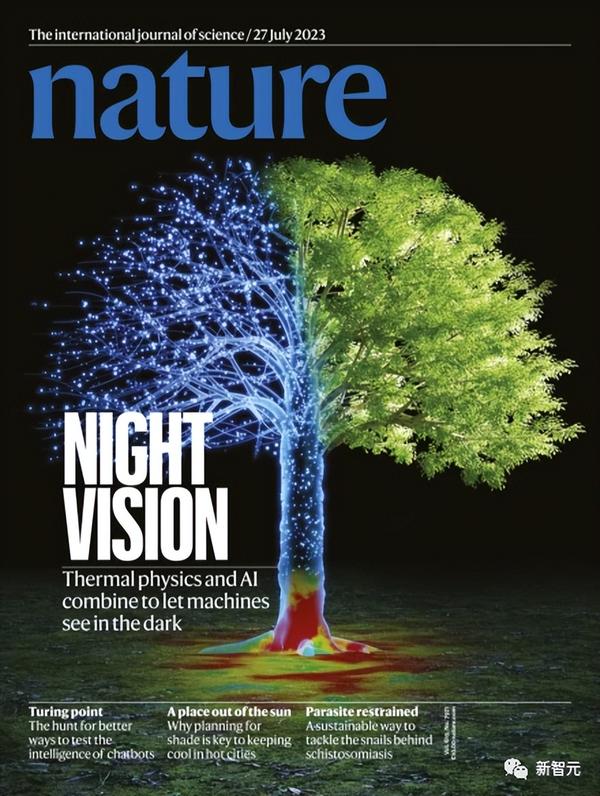
编辑:润 Lumina
【新智元导读】HADAR技术攻克了机器夜间识别的难题,加速第四次工业革命!
一夜之间,机器夜间识别的难题就被攻克了!
一篇AI与热物理学结合帮助机器在夜间成像的文章登上了Nature的封面。
文章的一作是毕业于浙江大学的Fanglin Bao,现在为普度大学研究员。
作者甚至认为,这项技术能够加速第四次工业革命的进程!
这项名为HADAR的技术,由来自普度大学和密歇根州立大学的研究人员研发而出。
让机器能像白天一样识别周围的环境,完成测距等一系列任务,对于自动驾驶等行业来说是革命性的突破。
长久以来,机器夜视很难做到像日天那样清晰。
对于夜间机器感知问题的处理,最先进的办法是利用热成像技术来重现环境。
但是夜视摄
......长按二维码访问原文

TorchSharp BiseNet V2网络实现 2023-08-22 11:31
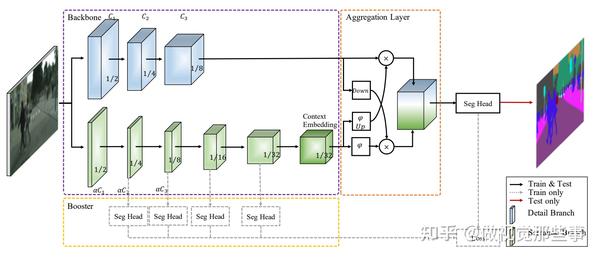
网络结构以及原理其他帖子可以查找到,不作具体的叙述。测试在单类别分割任务下,训练集20张,训练轮次20,学习率1e-6,有着不错的分割效果,我测试时输入的数据类型为热编码的Tensor,背景一个维度,每个类别的MASK一个维度(比较忙碌,好几个月没写C#了)
1.网络结构
BiseNet V2网络结构图如下所示
BiseNetV2网络结构图
2.ConvBNReLU
class ConvBNReLU : Module < Tensor , Tensor > { private Conv2d conv ; private BatchNorm2d bn ; private ReLU relu ; public ConvBNReLU ( int in_chan , int out_chan , int ks
......长按二维码访问原文
数字图像处理,学完冈萨雷斯的数字图像处理后会变得有多牛13? 2023-08-21 11:29
背景
最近想学习数字图像处理。需要搭建一个测试环境。
试了一下,可以用如下配置。
运行效果
开发环境搭建
开发语言:C语言
依赖库:
Raylib: 4.5.0,静态库
FreeImage: 3.18,windows 动态库,Mac 静态库
开发平台:跨平台开发
Windows: Visual Studio 2019 社区版(免费)
Mac: Vim, Makefile
我的Mac电脑是iMac2012,Intel架构的。OS:10.15.7
代码放在“码云”
第一个版本已经发布了。可以看到一些有意思的小程序。
其中 code/sample.c :zhe是Mac上开发的一个最基础的框架。
DIPStudy/sample/:这是VS2019的工程文件,Windows上开发的
......长按二维码访问原文
DragNUWA:拖拽图像生成视频 2023-08-22 14:52
DRAGNUWA: FINE-GRAINED CONTROL IN VIDEO GENERATION BY INTEGRATING TEXT, IMAGE, AND TRAJECTORY [paper] [demo]
这一工作基于扩散模型,目的是通过给定图像和文本,以及与图像对应的轨迹信息,生成图像沿着轨迹变化的视频。
DragNUWA的生成效果
这一工作与近期的几篇工作一脉相承:
DragGAN [paper] :给定 图像 和与图像对应的起始和终止 点 对,实现对 图像的编辑
和与图像对应的起始和终止 对,实现对 DragDiffusion [paper]:给定 图像 和与图像对应的起始和终止 点 对,实现对 图像的编辑
和与图像对应的起始和终止 对,实现对 DragonDiffusion [p
......长按二维码访问原文
一份高效学习工业3D视觉的学习路线(结构光/机械臂抓取/三维点云/缺陷检测) 2023-08-21 22:37
对于3D视觉,我这里总体给他包含三个方向:工业3D视觉、SLAM、自动驾驶。
对于工业3D视觉,近期有很多从事2D视觉行业希望转行到3D视觉行业的小伙伴问我,转行3D工业视觉,需要学习哪些知识体系?
这里我简单为大家分享下几个比较重要的模块:
一 3D重建
1.1面结构光三维重建方案
学习入口:https://ebzbf.xet.tech/s/1Fy7Nt
相较之前3D视觉工坊推出的结构光系列课程,该课程更加偏向于工业实战,目的在于帮助大家更快地入门结构光技术,从而更早地独立阅读相关论文。作者对第一期课程中存在的问题和不足进行了改进,大部分内容都得到了更新,讲解更为细致,可操作性更强,而非简单地第一期课程重复!第二期的课程大纲如下:
1.2 线结构光三维重建方案
学习入口:https://ebz
......长按二维码访问原文
AI代码神器火了,复杂操作秒变easy,网友:要抛弃VS Code了 2023-08-21 14:24
量子位 | 公众号 QbitAI
最近,AI代码编辑器Cursor火了——
凭借接入GPT-3.5/GPT-4,可实现跨文件提问和执行操作,一举成为新晋卷王。
麻麻再也不用担心我要挨个翻文件了,有啥问题直接chat chat:
GPT-3.5/GPT-4不了解最新知识,也不用再在对话框复制粘贴了。
Cursor可以直接“吃文档”,现看现总结:
要是代码执行失败,还可以自动调试,反复让AI思考哪儿错了&如何解决:
咱就是说这谁看谁不觉得操作简单?
凭谁发谁火、转赞量持续飙升就能说明一切:
Cursor也被网友称为最佳AI代码编辑器、在与AI集成方面最先进的IDE:
还有网友抛弃VS Code+Copilot,出走Cursor,并表示:
爱了爱了。
啊这……难道被称为卷
......长按二维码访问原文
沙龙招募 | ChatGPT把仿生机器人推到爆发前夜了吗? 2023-08-21 14:24
量子位 | 公众号 QbitAI
AGI 的发展,大模型的演进即将为仿生机器人补全最后一块拼图,许多从业者直言一直等待相关契机。
现在,「具身智能」概念不断火热,仿生机器人行业的下一突破,已在明日边缘。
在此之前,我们必须关注仿生机器人的发展还需解决哪些必要性问题:
什么样的技术是现在亟待突破的?
现有的大模型技术想要无缝接入仿生机器人,还需排除哪些困难?
将来我们会首先在哪个场景里看见仿生机器人的真正落地?
近日,量子位智库发布了《中国仿生机器人产业全景报告》,全面梳理了仿生机器人产业链结构,分析当前的竞争格局,指出行业发展趋势和可参考的关键因素。
基于报告和广泛的关注,我们希望能邀请到关注行业发展的技术专家和学者参与即将举办的仿生机
......长按二维码访问原文
<BUG>【OpenCV】图像显示不全_opencv图片显示不全_六月渔烬的博客-CSDN博客 2023-01-27 00:11:46
问题描述:
在使用 OpenCV 读取并展示图片文件时,有时会出现图片显示不全的情况。
例如:有如下原图
在经过以下代码后:
import cv2 img = imread('img.jpg') cv2.imshow('img',img) cv2.waitKey(0) cv2.destroyAllWindows()
展示窗口中显示的图像如下:
显然,这并不是我们想要的效果,我们展示图像的目的就是为了能观察图像,而图像的显示不全与我们的意愿背道而驰。同时,我们也发现,展示窗口的尺寸很大,而且无法更改,这也是我们所不希望的。
在显示图像前,增加 namedWindow 指令:
import cv2 img = imread('img.jpg') cv2.namedWindow('img', cv2.
......长按二维码访问原文
2021全国电设(F题)openmv的图像识别之数字识别_openmv数字识别_王哥来了快跑的博客-CSDN博客 2023-07-20 16:46:27
基于openmv的图像识别
通过参加全国电子设计大赛F题总结出openmv4的数字识别(其它版本暂时没试过,欢迎交流!)
openmv简介
OpenMV是一个开源,低成本,功能强大的机器视觉模块,以STM32F427CPU为核心,集成了OV7725摄像头芯片,在小巧的硬件模块上,用C语言高效地实现了核心机器视觉算法,提供Python编程接口 。同时 OpenMV也是一个可编程的摄像头,通过Python语言可实现你想要的逻辑。而且摄像头本身也内置了一些图像处理的算法,使用起来也更加的方便,仅需要写一些简单的Python代码,即可轻松的完成各种机器视觉相关的任务。
openmv4运行内存只有1MB,而openmv4plus运行内存有32MB。
一、打开OpenMV IDE软件
选择Cancel(不升级即
......长按二维码访问原文
Unet++语义分割网络(网络结构分析+代码分析)_unet++网络结构_NukaCC的博客-CSDN博客 2023-03-04 09:33:12
1. 前言
许多初入视觉深度学习的小伙伴都会以图像分类网络作为入门案例来学习,个人觉得语义分割网络可以作为分类网络之后第二个学习的案例,因为其网络结构一般较为简单,只要对每个像素点进行分类即可。刚好课题组召开分享会,就和大家分享下Unet++语义分割网络。注:以下分享的许多地方是我的个人理解,可能有不恰当之处还请指出和包涵。视频和代码链接在下方。
视频分享链接:课题组技术分享会-Unet++网络_哔哩哔哩_bilibili https://www.bilibili.com/video/BV1La411U7FS/?vd_source=73870594793a8be3d80e0be8a37582d3
github源码:GitHub - MrGiovanni/UNetPlusPlus: Official Ker
......长按二维码访问原文
图像分割中常用数据集及处理思路(含代码)_ade20k数据集_桑_榆的博客-CSDN博客 2023-04-26 23:45:00
C#版本数据结构,用C#的同志们有福啦 本书节选: 第1章 绪论 数据是外部世界信息的计算机化,是计算机加工处理的对象。运用计算机处 理数据时,必须解决四个方面的问题:一是如何在计算机中方便、高效地表示和 组织数据;二是如何在计算机存储器(内存和外存)中存储数据;三是如何对存 储在计算机中的数据进行操作,可以有哪些操作,如何实现这些操作以及如何对 同一问题的不同操作方法进行评价;四是必须理解每种数据结构的性能特征,以 便选择一个适合于某个特定问题的数据结构。这些问题就是数据结构这门课程所 要研究的主要问题。本章首先说明学习数据结构的必要性和本书的目的,然后解 释数据结构及其有关概念,接着讨论算法的相关知识,最后简单介绍本书所要用 到的相关数学知识和C#知识。 1.1 数据结构 1.1.1 学习数据结构的必要性
......长按二维码访问原文
计算机视觉基础学习-图像拼接_小夭。的博客-CSDN博客 2022-09-09 16:49:15
首先本文介绍的图像拼接并非对尺寸相同的图片进行简单拼接,而是基于全景图的拼接
普通相机拍摄图像时,无法兼顾相机视场与视场中单个物体的分辨率问题,而全景相机普遍价格昂贵,
不适用于低成本的一般性场景。为了使用普通相机获取宽视角,甚至是 360°全景图像,人们提出了图像拼接技术。图像拼接技术是指将含有重叠部分的两幅或多幅图像,通过图像预处理、图像配准和图像融合技术,拼接成一幅包含各图像信息的高分辨率、宽视角图像的技术。
图像拼接是将同一场景的多个重叠图像拼接成较大的图像的一种方法
基本思想:图像拼接并非简单的将两张有共同区域的图像把相同的区域重合起来,由于两张图像拍摄的角度与位置不同,虽然有共同的区域,但拍摄时相机的内参与外参均不相同,所以简单的覆盖拼接是不合理的。因此,对于图像拼接需要以一张图像为基准对另
......长按二维码访问原文
计算机视觉--距离变换算法的实战应用_是Dream呀的博客-CSDN博客 2023-07-24 15:15:34
前言: Hello大家好,我是Dream。 计算机视觉CV是人工智能一个非常重要的领域。 在本次的距离变换任务中,我们将使用D4距离度量方法来对图像进行处理。通过这次实验,我们可以更好地理解距离度量在计算机视觉中的应用。希望大家对计算机视觉和图像处理有了更深入的了解。让我们一起来看看实际的计算结果和可视化效果吧!
距离变换是一种常用的方法,它可以帮助我们计算出每个像素点与最近的前景像素点之间的距离。这对于图像分析、目标检测和图像配准等任务至关重要。 D4距离定义为两个像素点之间在水平和垂直方向上的绝对距离之和 。通过这种度量方式,我们可以获得每个像素点到最近的前景像素点的距离。为了测试距离变换的效果,我们首先随机生成了一张8*8大小的图像,并随机选取了其中的10个像素点作为前景像素。前景像素用1表示,背景像素
......长按二维码访问原文
Pytorch深度学习基础 实战天气图片识别(基于ResNet50预训练模型,超详细)_深度学习_day26——使用pytorch实现天气识别_落花雨时的博客-CSDN博客 2022-10-15 10:22:40
### 回答1: PyTorch是一个开源的机器学习框架,提供了对ResNet-50预训练模型的支持。可以使用torchvision.models模块轻松访问预训练的ResNet-50模型。可以在此模块中调用resnet50()函数来实例化该模型。 ### 回答2: ResNet50是一种非常流行的深度学习模型,它可以从微软的研究论文中获得,在PyTorch框架中也可以进行预训练。 预训练模型是在大型数据集上训练过的模型,可以提高性能和减少训练时间。ResNet50的预训练模型使用ImageNet数据集进行了训练,在PyTorch中可以通过调用```torchvision.models.resnet50(pretrained=True)``` 来加载该模型。 一旦加载了ResNet50预训练模型,它将产生一个用
......长按二维码访问原文
计算机视觉--利用HSV和YIQ颜色空间处理图像噪声_是Dream呀的博客-CSDN博客 2023-07-26 11:46:40
前言: Hello大家好,我是Dream。 今天我们将利用HSV和YIQ颜色空间处理图像噪声。在本次实验中,我们使用任意一张图片,通过 RGB转HSV和YIQ 的操作,加入了 椒盐噪声 并将其转 换回RGB 格式,最终实现对图像的噪声处理。一起来看看吧~
首先,我们导入需要的库。包括numpy用于处理数组数据,cv2用于图像处理,matplotlib用于可视化展示。
import numpy as np import cv2 from matplotlib import pyplot as plt
接下来,我们导入原始图像,并将其转换为RGB格式以便于显示。
img = cv2 . imread ( 'test.jpg' ) img = cv2 . cvtColor ( img , cv2 . COLO
......长按二维码访问原文
视频实时行为检测——基于yolov5+deepsort+slowfast算法_yolov5视频检测_Yunlord的博客-CSDN博客 2022-10-10 09:30:00
前言
前段时间打算做一个目标行为检测的项目,翻阅了大量资料,也借鉴了不少项目,于是打算通过yolov5实现目标检测,deepsort实现目标跟踪以及slowfast实现动作识别,最终实现端到端的目标行为检测模型。
总的来说,我们需要能够实现实时检测视频中的人物,并且能够识别目标的动作,所以我们拆解需求后,整理核心功能如下所示:
yolov5实现目标检测,确定目标坐标 deepsort实现目标跟踪,持续标注目标坐标 slowfast实现动作识别,并给出置信率 用框持续框住目标,并将动作类别以及置信度显示在框上
最终效果如下所示:
视频AI行为检测
“YOLO”是一种运行速度很快的目标检测AI模型,YOLO将对象检测重新定义为一个回归问题。它将单个卷积神经网络(CNN)应用于整个图像,将图像分成网格,并
......长按二维码访问原文
视觉识别数字、十字路口和T字路口,巡线于一体的基于openmv的解决方案(2021年电赛f题)_openmv识别路口_Meat_buns_dogs的博客-CSDN博客 2022-08-04 19:02:56
普通二本生(大二)没获奖,因为驱动方面和视觉协同问题没有做好(驱动方面跑太快,速度降不下来)只跑了最初级的,这个文章就是去记录一下我的成长过程吧。
最开始我的视觉方案,是通过训练神经网络实现识别数字的功能。但是训练出来却不能使用,也不知道是我的问题还是openmv的太老了不兼容。训练出来的包放入openmv中,openmv无法正常运行。(我使用的产品图片会在之后上传,在家没有硬件图),具体教程:https://book.openmv.cc/example/25-Machine-Learning/nn-lenet.html
于是想到了是否可以通过模板匹配来确定数字,模板匹配教程openmv官网上有。采用他们的方法,我首先尝试了一下,但是普通的灰色图片。因为我们的版本openmv只支持sensor.QQVG
......长按二维码访问原文
睿智的目标检测——Pytorch搭建YoloV7-OBB旋转目标检测平台__白鹭先生_的博客-CSDN博客 2023-03-13 09:52:56
学习前言
基于B导开源的YoloV7-Pytorch源码开发了 Yolov7的旋转目标检测版本。
源码下载
https://github.com/Egrt/yolov7-obb
喜欢的可以点个star噢。
1、主干部分:使用了创新的多分支堆叠结构进行特征提取,相比以前的Yolo,模型的跳连接结构更加的密集。使用了创新的下采样结构,使用Maxpooling和步长为2x2的特征并行进行提取与压缩。
2、加强特征提取部分:同主干部分,加强特征提取部分也使用了多输入堆叠结构进行特征提取,使用Maxpooling和步长为2x2的特征并行进行下采样。
3、特殊的SPP结构:使用了具有CSP机构的SPP扩大感受野,在SPP结构中引入了CSP结构,该模块具有一个大的残差边辅助优化与特征提取。
4、自适应多正样本
......长按二维码访问原文
【手拉手 带你准备电赛】单色块识别(基于openmv)_openmv识别颜色块原理_一口吞掉小蛋糕的博客-CSDN博客 2022-04-17 12:09:28
目录
文章背景
openmv介绍
openmv色块识别原理
openmv色块识别代码
最终结果
疑惑细解:
关于阈值的设置:
关于自动增益和白平衡
文章背景
我们都听说过什么图像识别、色块识别,并且在2021年电赛——智能送药小车中也使用到了相关技术,那么你知道相关的原理和实现方法吗?接下来小蛋糕带你一探究竟。
openmv介绍
首先我要为大家介绍一下,本篇文章的硬件平台——openmv。openmv并不仅仅是一个摄像头,它搭载了STM32的系列芯片,并且封装好了大量可供用户直接调用的函数,这些函数已经可以满足我们对于图像处理的大部分需求。在openmv的操作中,我们使用python调用相关函数进行编程。
openmv色块识别原理
openmv实现色块的识别使用过一个非常容易理解的原
......长按二维码访问原文
【学习笔记】Yolov5调用手机摄像头实时检测(环境配置+实现步骤)_窝工昆邪的博客-CSDN博客 2023-03-12 23:05:12
一、下载源码和权重文件
我们需要首先从GitHub获取到yolov5的源码,直达链接如下:
https://github.com/ultralytics/yolov5
打开后按照如下步骤下载源码压缩包即可
权重文件下载地址:https://download.csdn.net/download/liujiahao123987/87400892
二、在手机端下载IP摄像头
注:我用的iOS,安卓版本没有"Lite"
需要的就是这个局域网,每个人的都不一样
三、安装Anaconda,CUDA,CUDNN(安装过的可以跳过)
需自行配置环境,本人利用anaconda创建的虚拟环境,步骤如下:
首先下载anaconda 官网:https://www.anaconda.com/
在开始中找到Anaco
......长按二维码访问原文
从Python到计算机视觉:入门指南_python 视觉_一只贴代码君的博客-CSDN博客 2023-08-18 12:14:47
Python一直是计算机科学领域中最受欢迎的语言之一。它不仅易于学习和使用,而且具有广泛的应用领域,尤其是计算机视觉方面。本文将为读者提供一份详细的入门指南,帮助初学者了解Python和计算机视觉的基础知识和应用。
安装Python
要开始使用Python,您需要下载并安装Python编程语言。可以访问官方Python网站下载最新版本的Python。在安装之前,请选择适合您的计算机和操作系统的版本,例如Windows、macOS或Linux。
学习Python语言基础
在学习任何编程语言之前,您需要了解其基础知识。Python是一门高级语言,它具有易于学习和使用的语法。在学习Python时,您需要掌握其基本概念和语法,如变量、运算符、控制流程、函数和模块等。
Python和计算机视觉
计算机视觉是指
......长按二维码访问原文
计算机视觉框架OpenMMLab(一):计算机视觉基础_GoAI的博客-CSDN博客 2023-03-06 09:32:55
### 回答1: 《计算机视觉 : 一种现代方法 第二版 pdf》是一本介绍计算机视觉领域基础理论和方法的书籍。计算机视觉是一门研究如何让计算机能够“看”的学科,它使用计算机科学和人工智能的方法来解决从图像或视频中获取、处理和理解信息的问题。 这本书是计算机视觉领域的经典教材之一,第二版对第一版进行了更新和扩充。书中首先介绍了计算机视觉的基本概念和应用领域,包括图像处理、模式识别和三维重建等。接着,书籍详细阐述了计算机视觉中的各种算法和技术,包括图像特征提取、目标检测与跟踪、图像分割和图像匹配等。 此外,该书还介绍了计算机视觉中的一些高级主题,如深度学习在计算机视觉中的应用、立体视觉和物体识别等。书中的内容深入浅出,既易于理解又具有一定的深度,适合作为计算机视觉领域的入门教材或用于相关专业人员的学习和研究参考。
......长按二维码访问原文
基于OpenCV 的车牌识别_opencv车牌识别_非常颜色的博客-CSDN博客 2023-02-09 10:06:10
基于OpenCV 的车牌识别
车牌识别是一种图像处理技术,用于识别不同车辆。这项技术被广泛用于各种安全检测中。现在让我一起基于 OpenCV 编写 Python 代码来完成这一任务。
车牌识别的相关步骤
1. 车牌检测:第一步是从汽车上检测车牌所在位置。我们将使用 OpenCV 中矩形的轮廓检测来寻找车牌。如果我们知道车牌的确切尺寸,颜色和大致位置,则可以提高准确性。通常,也会将根据摄像机的位置和该特定国家 / 地区所使用的车牌类型来训练检测算法。但是图像可能并没有汽车的存在,在这种情况下我们将先进行汽车的,然后是车牌。
2. 字符分割:检测到车牌后,我们必须将其裁剪并保存为新图像。同样,这可以使用 OpenCV 来完成。
3. 字符识别:现在,我们在上一步中获得的新图像肯定可以写上一些字符(数字 /
......长按二维码访问原文
【OpenCV】 人脸识别_opencv人脸识别_顾城沐心的博客-CSDN博客 2022-11-18 11:55:35
目录
一:前言
二:人脸识别案例 实现步骤及完整代码
步骤1 灰度化处理
步骤2 将灰度图再次进行 行列压缩
步骤3 直方图均值化
步骤4 使用模型 对每一个像素点遍历 图像甄别
人脸识别案例 源码分享
结果测试:可对人脸框选识别
三:车辆识别案例 级联分类器 具体实现
一:前言
本次人脸识别技术使用到的是级联分类器
对于级联分类器,如果想要自己训练模型可以参考这篇文章
【OpenCV】 级联分类器训练模型
【友情提示:训练对电脑的配置要求比较高,另外还需要有足够庞大的样本数据,因此,如果是研究生在导师实验室用着3090的,可以自己训练,但也要投入足够的时间进行数据采集。不过,这边为了方便大家学习,博主会在资源中分享 人脸识别训练模型 车辆识别训练模型 ,在读完这篇文章后,感兴趣的,
......长按二维码访问原文
使用C++和OpenCV进行人脸识别,包含模型训练与调用过程_人脸识别c++_LewGarben的博客-CSDN博客 2023-05-13 17:35:18
人脸识别是计算机视觉领域的一个重要应用,可以用于安全系统、人脸解锁和人脸表情分析等方面。本教程将向您展示如何使用C++和OpenCV库实现基本的人脸识别功能。我们将分为两部分,首先是模型训练过程,然后是调用过程。
安装OpenCV和C++开发环境:
在开始之前,请确保您已经安装了OpenCV库和C++开发环境。您可以从OpenCV官方网站下载和安装OpenCV,并设置好C++编译环境。
准备数据集:
为了训练人脸识别模型,您需要一个带有标记的人脸数据集。收集足够数量的人脸图像,并为每个人脸标记一个唯一的标签。
数据预处理:
在进行训练之前,需要对数据集进行预处理。使用OpenCV库的人脸检测器来定位和裁剪人脸区域。确保所有图像具有相同的大小和格式。
训练人脸识别模型:
使用预处理后的数据集,我们
......长按二维码访问原文
OpenCV-PyQT项目实战(11)项目案例07:摄像头操作与拍摄视频_opencv 控制摄像头_youcans_的博客-CSDN博客 2023-03-05 10:05:40
在上一个案例中我们介绍了OpenCV和PyQt 实现视频播放,本节介绍摄像头操作与拍摄实时视频。
本例使用 OpenCV处理摄像头设备进行解码获得图像帧,然后用 QTime 定时器控制 QLabel 中的图像更新,使用按钮控制摄像画面的移动。
1. 用OpenCV获取视频流
1.1 OpenCV的VideoCapture类
OpenCV提供了VideoCapture类和VideoWriter类处理视频流,既可以处理视频文件,也可以处理摄像头设备。
函数原型:
cv.VideoCapture( index[, apiPreference] ) →
cv.VideoWriter([filename, fourcc, fps, frameSize[, isColor]]) →
VideoCapture
......长按二维码访问原文
YOLOv8改进损失函数WDLoss:独家更新|即插即用|YOLOv8小目标检测高效涨点2%,改进用于小目标检测的归一化高斯 Wasserstein Distance Loss,提升小目标检测_芒果汁没有芒果的博客-CSDN博客 2023-03-27 11:54:33
在目标检测领域,YOLOv7无疑是一个备受称赞的算法,它具有高速和高精度的优点,但是对于小目标检测,它在检测精度方面仍有改进空间。在这篇文章中,我们提出了一种新的包围框相似度度量方法,即归一化高斯Wasserstein Distance Loss (N-GWDLoss)。N-GWDLoss是针对小目标检测而设计的,它通过归一化高斯形式的Wasserstein距离来度量包围框之间的相似度。与传统的L1、L2和IoU度量不同,N-GWDLoss能够有效地缩小目标检测中小目标检测与大目标检测之间的性能差距。
......长按二维码访问原文
快速通过pycharm搭建python+opencv实现人脸检测_pycharm人脸识别源码_超561的博客-CSDN博客 2023-01-20 14:01:38
首先导入opencv
1代码实现效果,在界面下显示所要显示的图片
在同一目录下存放显示的图片
img = cv.imread('face1.jpg')函数字符串变量填写存放照片的名字
为了让人眼看到照片所以使用cv.waitKey(0),起到delay的作用
#导入cv模块 import cv2 as cv #读取图片 img = cv.imread('face1.jpg') #显示图片 cv.imshow('read_img',img) #等待 cv.waitKey(0) #释放内存 cv.destroyAllWindows()
2代码实现效果对图片进行灰度转换
灰度转换可以让计算机更轻易对图片进行识别
此函数用来进行图片的灰度转换 gray_img = cv.cvtColor(img,cv.
......长按二维码访问原文

基于ENVI软件灰度共生矩阵特征GLCM提取纹理特征_envi灰度共生矩阵_啥都不懂的研究生的博客-CSDN博客 2022-06-09 16:08:41
1.灰度共生矩阵生成原理 灰度共生矩阵(GLDM)的统计方法是20世纪70年代初由R.Haralick等人提出的,它是在假定图像中各像素间的空间分布关系包含了图像纹理信息的前提下,提出的具有广泛性的纹理分析方法。 灰度共生矩阵被定义为从灰度为i的像素点出发,离开某个固定位置(相隔距离为d,方位为)的点上灰度值为的概率,即,所有估计的值可以表示成一个矩阵的形式,以此被称为灰度共生矩阵。对于纹理变化缓慢的图像,其灰度共生矩阵对角线上的数值较大;而对于纹理变化较快的图像,其灰度共生矩阵对角线上...
......长按二维码访问原文
【计算机视觉】图像分割与特征提取——基于Roberts、Prewitt、Sobel算子的图像分割实验_使用sobel 算子的图像分割实验 调入并显示图像;使用sobel算子对图像进行边缘_赵四司机的博客-CSDN博客 2022-11-03 09:41:55
个人简介:
前言:
实验中要求能够自行评价各主要算子在无噪声条件下和噪声条件下的分割性能。能够掌握分割条件(阈值等)的选择。完成规定图像的处理并要求正确评价处理结果,能够从理论上作出合理的解释。通过实验体会一些主要的分割算子对图像处理的效果,以及各种因素对分割效果的影响。
目录
一:相关概念
1.什么是边缘
2.边缘检测算法
(1)一阶梯度算子
(2)二阶导数
二:使用Roberts算子进行分割
1.实验原理
2.代码实现
3.实验分析
三:使用Prewitt算子进行分割
1.实验原理
2.代码实现
3.实验分析
四: 使用Sobel算子进行分割
1.实验原理
2.代码实现
3.实验分析
一:相关概念
1.什么是边缘
什么是边缘?相信很多人都能说出什么是边缘或者指出
......长按二维码访问原文
【AI数学】相机成像之内参数_相机内参数_木盏的博客-CSDN博客 2023-02-11 15:08:35
计算机视觉偏底层的工作会跟摄像机打交道,最近正好有接触,所以整理总结一下。
相机参数通常分为 内参数 、 外参数 ,偶尔会有畸变参数等滤镜参数。
申明:本文图例均为原创,借用需附此文链接。
内参数:相机内部的参数,包括焦距、像素偏移等。
外参数:相机摆放的位置、角度等。
本文主要介绍相机内参数,并且给出简单的数学推理。
必需预备知识:初中数学+初中物理(不满足条件的不用往下看了-_-)
这里用到的物理知识是“ 光沿直线传播 ”,用到的数学知识是“ 相似三角形 ”。相机成像用到的是“ 小孔成像原理 ”,相机内部有一块平面感光元件,物体光线通过 光圈 (小孔成像的小孔)打到平面感光元件上完成成像。
图1 相机小孔成像
相机成像无非就是把真实世界里三维坐标里的一个点投影到胶片平面上。图1里描述了
......长按二维码访问原文
基于opencv-mediapipe的手势识别_开源手势识别_困了不能睡的博客-CSDN博客 2023-03-01 16:05:17
上一篇文章介绍了基于opencv的手势识别,如果大家运行了我的代码,会发现代码中找出手部轮廓的效果不是很理想。当时我在网上找寻解决的办法,刚好找到了mediapip库,然后我就利用opencv和mediapipe这两个库重新进行了手势识别的代码编写。效果还不错,写篇文章记录一下。
Mediapipe是google的一个开源项目,可以提供开源的、跨平台的常用机器学习(machine learning)方案。Mediapipe实际上是一个集成的机器学习视觉算法的工具库,包含了人脸检测、人脸关键点、手势识别、头像分割和姿态识别等各种模型。
由于我主要做的是手势识别,我就主要简单地讲解一下该库的手部检测模块,以便大家能更好的理解最后的手势识别的源代码。(如果大家想要了解其他模块,可以点击这里的进行了解:mediap
......长按二维码访问原文
Yolov5移植树莓派实现目标检测_树莓派yolo目标检测_爱睡觉的咋的博客-CSDN博客 2022-12-31 09:55:49
Hallo,大家好啊!之前写了几篇Yolov5相关项目的博客,然后学习了树莓派之后,更新了几篇树莓派的博客,我的最终目的是将Yolov5移植到树莓派,通过树莓派上面的摄像头实现目标检测。你想啊,在工厂里面,你不可能用笔记本电脑作为上位机给下位机传达指令,所以树莓派作为一个小型pc,有着独天独厚的优势。接下来,以项目为驱动,介绍一下整个流程,包括Yolov5数据集获取、模型的训练、识别效果、树莓派环境的搭建、移植树莓派、模型在树莓派上的检测效果!
目录
一、任务描述
二、数据集获取
三、Yolov5模型训练
四、模型训练结果
五、检测效果
六、树莓派环境搭建
七、Yolov5移植树莓派
八、树莓派检测效果
总结
一、任务描述
通过机器视觉的方式实现对工件的识别,以树莓派作为上位机,根据不同
......长按二维码访问原文
相机内参标定,相机和激光雷达联合标定_激光雷达相机联合标定_学无止境的小龟的博客-CSDN博客 2022-08-28 13:21:41
1.1 成像过程
现实物体在相机中的成像过程离不开世界坐标系、相机坐标系、图像坐标系以及像素坐标系,只有理解了这些才能对获取的图像进行准确的分析。
成像过程:
四个坐标系如下图所示:
世界坐标系(world coordinate system):
现实世界的三维坐标系,是现实世界的物理模型,单位为m。
相机坐标系(camera coordinate system):
以镜头硬件的光电系统为基础,建立的坐标系,为了从相机的角度描述物体位置而定义,首先建立相机的坐标系,作为沟通现实世界和图像/像素坐标系的中间桥梁,单位为m;世界坐标系到相机坐标系只涉及旋转和平移,所以是刚体变换,不涉及形变。
世界坐标系 —> 相机坐标系
绕Z轴旋转的坐标关系如下:
所以从世界坐标系到相机坐标系的
......长按二维码访问原文
计算机视觉:场景识别(Scene Recognition)_cv-player的博客-CSDN博客 2023-03-16 15:38:40
完整程序请移步至此链接下载
场景识别
在这个项目中,我将对15个场景数据库(Bedroom、Coast、Forest、Highway、Industrial、InsideCity、Kitchen、LivingRoom、Mountain、Office、OpenCountry、Store、Street、Suburb、TallBuilding)进行训练和测试,借助HOG特征提取构建词袋模型,并利用集成学习分类器将场景分为15个类别之一。
图像分类
图像分类是机器视觉中一个重要的问题,其基本概念是:通过算法自动把图像划分到特定的概念类别中。图像分类算法一般分为训练和测试两个阶段,其基本流程如下图所示。
特征提取
HOG是Histogram of Oriented Gradient的缩写,是一种在计算机视觉
......长按二维码访问原文

如何为计算机视觉任务标记图像_贝壳里的海-AI的博客-CSDN博客 2023-07-05 15:39:43
### 回答1: 基于Keras的猫狗识别分类是计算机视觉领域中的图像分类问题。图像分类的过程可以分为以下几个步骤。 首先,需要准备好猫狗图像的数据集。数据集应包含一定数量的猫和狗的图像,并且每个图像都需要被标记为猫或狗。这个数据集将用于模型的训练和测试。 其次,需要建立一个深度学习模型来进行图像分类。在Keras中,可以使用已经预定义好的卷积神经网络模型(如VGG16、ResNet等),也可以自定义网络结构。该模型将有助于提取图像中的特征。 然后,需要对数据集进行预处理。这包括将图像进行大小调整、归一化以及图像增强等操作。预处理有助于提高模型的训练效果和泛化能力。 接下来,将数据集划分为训练集和测试集。训练集用于模型的训练,而测试集用于评估模型的性能。通常,大部分数据被用于训练,剩余的一部分数据用于测试。 然
......长按二维码访问原文
利用OpenCV的函数matchTemplate()实现在图像中寻找、检索、搜索模板图像【图像模板匹配】_昊虹AI笔记的博客-CSDN博客 2023-02-24 11:57:47
利用OpenCV的函数matchTemplate()实现在图像中寻找、检索、搜索模板图像【图像模板匹配】
在博文 https://www.hhai.cc/thread-220-1-1.html 中我们利用直方图的反向投影原理可以寻找图像中具有某个直方图特征的部分。
但是有时候会遇到这样的情况:图像中某个部分的直方图与某个特征的直方图相同,但内容却完全不一样,这个时候我们通过直方图的反向投影原理找到的部分就不是我们希望找到的。
在这种情况下,我们可以通过直接比较图像的像素值来检索是否原图中与模板图像存在相同内容,这种通过比较像素值来寻找相同内容的方法叫作图像模板匹配。
OpenCV提供了函数matchTemplate()来实现图像模板匹配。
具体实现方法如下:
①在待匹配图像中选取与模板图像尺寸相同的
......长按二维码访问原文
计算机视觉——yolov5回归与跨网格预测、训练技巧(下篇)_yolov5 边框预测_想太多!的博客-CSDN博客 2023-04-19 10:23:54
1. yolov5网络架构与组件
1.1 网络可视化工具 netron
在线版本:浏览器中输入链接: https://lutzroeder.github.io/netron/
netron官方的Github链接:https://github.com/lutzroeder/netron
1.2 不同模型的配置
1.3 Focus 模块
一个小实验:
Focus()模块是为减少错误和提高速度而设计的,而不是提高精度。
1.4 CSPNet 跨阶段局部网络
1.5 SPP 空间金字塔池化
在CSP上添加SPP块,因为它显着地增加了接收字段,分离出了最重要的内容,几乎没有降低网络的操作速度。
1.6 PANet 路径聚合网络
2. 损失函数
2.1 类别预测
2.2 边界框回归
2.3 回
......长按二维码访问原文
【计算机视觉】新冠肺炎COVID-19 CT影片阳性检测,感染区域分割,肺部分割,智慧医疗实践,医疗影像处理示例_lungmask 镜像_Kim‘s blog的博客-CSDN博客 2022-03-11 15:35:19
引言
新型冠状病毒肺炎(Corona Virus Disease 2019,COVID-19),简称“新冠肺炎”,世界卫生组织命名为“2019冠状病毒病”。截止至2021年12月5日,全球累计确诊病例264047110例,累计死亡5240683例,并且这个数字还在继续高速攀升。
基于肺部CT(computed tomography)影像的人工智能诊断是针对新型冠状病毒肺炎的有效辅助诊断方法之一。
本次实验基于COVID-19 CT scans数据集,根据患者肺部的CT扫描分析,对患者COVID阳性还是阴性进行分类。如果患者Covid阳性,则这行肺部和感染区域的分割。实验还实现了交互性良好的可视化界面,更有助于医护人员对病情的快速筛查。
数据集概述
COVID-19 CT scans数据集包含20例诊断
......长按二维码访问原文
minigpt4搭建过程记录,简单体验图文识别乐趣_submarineas的博客-CSDN博客 2023-04-25 15:38:03
引言
从3月开始,aigc进入了疯狂的开端,正如4月12日无界 AI直播 在《探索 AIGC 与人类合作的无限可能》中关于梳理的时间线一样,aigc的各种产品如雨后春笋般进入了不可逆的态势,里面有句话很形象,人间一日,AIGC十年。这产变革像是有计划性的沧海桑田,让每个参与者亦或者体验者都感觉时过境迁,本文是针对前几天刚发布的minigpt4,简单写了个部署教程,最近GitHub trending中有太多的奇思妙想,在基于chat的这么一个模型下,每个人都能让故事开始变得天马行空,充满无限的可能。
理论介绍
在 MiniGPT-4: Enhancing Vision-Language Understanding with Advanced Large Language Models 这篇官方开源的论文中,
......长按二维码访问原文
7-坐标系及变换_eci坐标系_伊伊_f的博客-CSDN博客 2022-10-09 19:47:02
1.地心惯性坐标系ECI (Earth-Centered Inertial Frame)
惯性坐标系是指相对于宇宙的其他部分而言没有加速度和转动的坐标系。它是描述位置,速度,加速度,姿态和角速度之间的数学关系。惯性传感器测量的是相对惯性坐标系的运动.在惯性系中算出的姿态,位置,速度后,投影到当地导航坐标系。
地心惯性坐标系不随地球的转动而转动.
2.地心地固坐标系ECEF(Earth-Centered Earth-Fixed Frame)
ECEF和ECI的相同点和区别点:
(1).原点相同(都是地球质心)
(2).Z轴相同
(3).ECI的x,y轴是固定的,不随地球自转而转动,而ECEF的x,y轴相反
3.当地导航坐标系(Local Navigation Frame)
当地导航系相对地球是运
......长按二维码访问原文

RM视觉组考核-装甲板识别(Opencv和C++实现)_晕fufu的小鱼的博客-CSDN博客 2023-01-12 23:00:13
本套代码的思路
先对图像进行预处理
1.为矫正图像畸变
2.将rgb图像进行通道分离,这样能减少其它光一定的干扰,同时方便进行二值化
3.将分离后的单通道进行二值化
4.将二值化的图片进行形态学操作的开操作,减少噪点,使灯条的位置更加明显
进行灯条识别
5.将预处理好的图片用findcounters进行轮廓识别
6.将识别出的灯条的轮廓存入旋转矩形
7.利用旋转矩形的成员,用面积和宽高比筛选出符合要求的灯条
进行装甲板识别
8.利用旋转矩形的成员角度,匹配两个角度相差不大的灯条矩形作为装甲板的左右两边(经测试,利用角度识别率较高)
9.将匹配好的灯条的中心、宽度、高度、角度作为装甲板矩形的性质
10.用一个新旋转矩形的容器装入识别好的装甲板的性质
坐标获取
11.利用旋转矩形的坐标
......长按二维码访问原文
使用opencv实现简单的人脸识别_opencv 人脸识别_李招财的猫抓板的博客-CSDN博客 2022-10-18 17:29:41
一、opencv模块的使用
1、简介
opencv-python是一个python绑定库,旨在解决计算机视觉问题。使用opencv模块,可以实现一些对图片和视频的操作。
2、安装
安装opencv之前需要先安装numpy, matplotlib。然后使用pip安装opencv库即可。
3、导入
使用import cv2进行导入即可,需要注意的是cv2读取图片的颜色通道是BGR(蓝绿红)。
4、使用
使用cv2.imread()接收读取的图片,此处需要注意的是读取路径必须为英文。
cat = cv2.imread("cat1.png")
使用cv2.imshow()函数显示读取的图片。
cv2.imshow("cat", cat)
其中,函数内的第一个参数为显示图片窗口左上角的名字,第二个
......长按二维码访问原文
FP7195转模拟恒流调光芯片在机器视觉光源的应用优势_pwm转模拟调光_Li_13691661579的博客-CSDN博客 2022-07-30 13:45:32
机器视觉是人工智能正在快速发展的一个分支。简单说来,机器视觉就是用机器代替人眼来做测量和判断。照明是影响机器视觉系统输入的重要因素,它直接影响输入数据的质量和应用效果。随着计算能力的增强,更高分辨率的传感器的迭代,更快的扫描率和软件功能的提高,这推动了更快的总线的出现,而总线又反过来允许具有更多数据的更大图像以更快的速度进行传输和处理。所以机器视觉的摄像机趋向高分辨率,而因为不同的环境光会干扰摄像机的成像,就需要有:背向照明、前向照明、结构光和频闪光照明等光源来进行补光。对光源的要求就是需要支持高分辨率的调光控制和稳定的负载调整率(个别设备会在运行中因为电源忽然重载出现供电电压下降现象)。
一、基础性能
1.零压差
FP7195最大占空比可达100%,所以在操作时候输入电压可以几乎等于LED电压(电路元件
......长按二维码访问原文
常见摄像头接口USB、DVP、MIPI接口的对比_dvp摄像头_物联网老王的博客-CSDN博客 2023-03-05 16:02:21
引言
摄像头传感器已经广泛用于嵌入式设备了,现在的手机很多都支持多个摄像头。
在物联网领域,摄像头传感器也越来越被广泛使用。今天就来简单聊一聊几种常见的摄像头接口。
传感器与主控设备进行通信,是设备-设备之间的通信,几乎所有的设备间通信都需要约定传输数据的时序,即什么时间(或者说速率)按什么格式传输数据。
设备间通信主要使用同步、异步通信两种方式。典型的同步通信比如 I2C、异步通信如 USART。
同步通信的典型特点是有时钟信号总线完成两个设备的数据同步,比如常见的 I2C、SPI 通信都有 SCL/CLK 时钟线:
异步通信的典型特点是没有时钟信号总线,两个设备之间提前约定好速率,通信双方按约定的速率进行传输数据,然后按照指定的格式区分起始信号、数据信号、停止信号。比如常见的 UART 通信
......长按二维码访问原文
相机标定-张正友棋盘格标定法_张正友相机标定_呵呜昂黄hj的博客-CSDN博客 2022-05-23 21:36:08
目录
1.针孔相机模型
2.相机成像过程
2.1 各个坐标系之间的转换
2.1.1 图像坐标系到像素坐标系
2.1.2 相机坐标系到图像坐标系
2.1.3世界坐标系到相机坐标系
2.1.4世界坐标系到像素坐标系
3.畸变与畸变矫正
3.1 畸变
3.2 畸变公式
4.相机标定原理
5.张正友标定法介绍
5.1张正友标定法的整体流程
5.2 张正友标定法的模型
5.3 模型求解
6.相机标定的步骤
7.源代码
8.实验结果及分析
8.1 实验结果
8.2 结果分析
1.针孔相机模型
针孔相机成像原理其实就是利用投影将真实的三维世界坐标转换到二维的相机坐标上去,其模型示意图如下图所示:
(X,Y,Z)为在世界坐标系下一点的物理坐标
( u , v ) 为该点对应的在像
......长按二维码访问原文
【YOLOv8】实战一:手把手教你使用YOLOv8实现实时目标检测_yolo对游戏画面实时检测_virobotics的博客-CSDN博客 2023-04-15 13:29:31
前言
从2015 年首次发布以来,You Only Look Once (YOLO) 系列计算机视觉模型一直是该领域最受欢迎的模型之一。其中,YOLO 架构的核心创新是将目标检测任务视为回归问题,从而使模型同时对所有目标边界框和类别概率生成预测。在过去的八年中,这种架构创新催生了一系列 YOLO 模型。之前也给大家介绍了一些YOLO 模型在LabVIEW上的部署。感兴趣的话可以查看专栏【深度学习:物体识别(目标检测)】本文主要想和各位读者分享YOLOv8在LabVIEW中的部署。
YOLOv8 是由 YOLOv5 的发布者 Ultralytics 发布的最新版本的 YOLO。它可用于对象检测、分割、分类任务以及大型数据集的学习,并且可以在包括 CPU 和 GPU 在内的各种硬件上执行。
YOLOv8是一种
......长按二维码访问原文
Autoware1.14-摄像头、激光雷达感知融合_range_vision_fusion_Double lee的博客-CSDN博客 2022-10-18 15:58:11
本文是来自黄浴博士的知乎专栏,(原谅我文章的图都是截图)主要概述自动驾驶系统中的传感器的标定的方法。讨论不同传感器之间的外参标定,特别是激光雷达和摄像头之间的标定。 地址为https://zhuanlan.zhihu.com/p/57028341 1、引言 传感器标定是自动驾驶的基本需求,一个车上装了多个/多种传感器,而它们之间的坐标关系是需要确定的。湾区自动驾驶创业公司ZooX的co-found...
......长按二维码访问原文
毕业设计-基于机器视觉的水表读数智能识别系统-OpenCV_水表读数自动识别_HaiLang_IT的博客-CSDN博客 2023-01-06 18:30:00
目录
前言
课题背景和意义
实现技术思路
一、系统总体方案设计
二、图像预处理的研究与实现
三、识别区域定位及字符分割的研究与实现
实现效果图样例
最后
前言
?大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
? 对毕设有任何疑问都可以问学长哦!
选题指导: https://blog.csdn.net/qq_37340229/article/details/128243277
大家好,这里是海浪学长毕设专题,本次分享的
......长按二维码访问原文
2023年目标检测毕业设计(yolov5车辆识别、车辆检测、车牌识别、行人识别)_SYBH.的博客-CSDN博客 2023-03-15 00:32:32
您好!对于使用YOLOv5进行车辆和行人识别的问题,您可以按照以下步骤进行操作: 1. 安装YOLOv5:首先,您需要在您的开发环境中安装YOLOv5。您可以从YOLOv5的官方GitHub存储库中获取最新的代码和模型。 2. 准备数据集:为了训练和测试YOLOv5模型,您需要准备一个包含车辆和行人图像及其对应标签的数据集。确保数据集中有足够多样化的图像,以便模型能够学习不同场景下的车辆和行人特征。 3. 训练模型:使用准备好的数据集,您可以开始训练YOLOv5模型。根据YOLOv5的文档提供的指南,您可以设置训练参数并启动训练过程。训练过程可能需要一些时间,具体取决于您的数据集大小和训练硬件性能。 4. 模型评估:在训练完成后,您可以使用测试数据集对训练得到的模型进行评估。通过计算模型在测试集上的准确率、召回
......长按二维码访问原文
【深度相机D435i】Windows+Ubuntu下调用D435i利用Python读取、保存RGB、Depth图片_怎么使用深度摄像头d435_杨立青101的博客-CSDN博客 2022-11-20 20:21:54
前言
最近组里面的项目需要用到D435i深度相机采集深度图片,所以记录一下在Windows+Ubuntu的环境下使用D435i深度相机的流程,以及如何利用python读取、保存常见的RGB、Depth图片。
D435i 在小巧外形中采用英特尔模块和视觉处理器,是一个功能强大的一体产品,可与可定制软件配合使用,是一款能够了解自身运动的深度摄像头。 运动中的摄像头的理想选择 D435i 结合了宽视场和全局快门传感器,是机器人导航和物体识别等应用领域的首选解决方案。 更宽的视场使单个摄像头能够覆盖更广的区域,从而减少“盲点”。 全局快门传感器提供极低的光敏感度,使机器人能够在关灯的情况下在空间中导航。 简单集成的完整套件 深度摄像头 D435i 属于英特尔® 实感™ D400 系列摄像头,该产品系列采用了英特尔最
......长按二维码访问原文
OpenCV实现照片换底色处理_莫浅子的博客-CSDN博客 2023-07-21 07:45:00
目录
1.导言
2.引言
3.代码分析
4.优化改进
5.总结
1.导言
在图像处理领域,OpenCV是一款强大而广泛应用的开源库,能够提供丰富的图像处理和计算机视觉功能。本篇博客将介绍如何利用Qt 编辑器调用OpenCV库对照片进行换底色处理,实现更加独特和吸引人的效果
最终的实现效果如下图
2.引言
OpenCV是一个跨平台的计算机视觉库,其中包含了大量用于图像处理的函数和算法。照片换底色处理是一种常见的图像处理技术,可应用于广告设计、摄影后期处理等领域,为照片增添更多的艺术表现力。本次博客将使用OpenCV库中的函数和方法,在一张照片中将指定颜色范围内的背景替换为自定义的颜色。
3.代码分析
照片换底色处理是一种图像处理技术,通过选择并替换背景颜色,改变照片的整体视觉效果。Open
......长按二维码访问原文
超简单教你在树莓派上安装opencv(二)_树莓派安装opencv_流 浪 猫的博客-CSDN博客 2022-04-27 23:00:53
前言
使用须知:本文章主要是针对 Python3.9.2 版本的Python安装 OpenCv,如果你的 Python 版本不是 Python3.9.2,而是在3.8 以下,你可以点击 这里的教程 来安装OpenCv。另外有的版本好像是 Python3.9.3,本文方法应该不适用。
因为自己直接下载的官方32位操作系统的镜像,在写博客时未考虑到系统位数问题,在此提前告知各位,因作者本人未尝试在64位系统上进行安装OpenCv,所以不清楚在安装过程中是否会有报错以及是否能够安装成功,大家可以进行尝试。
在此感谢用户 qq_46120289 提出该问题
getconf LONG_BIT
因为不同的Python版本操作方法不同,所以跟对教程很重要。
1.2 换源
大家可以跟着我之前的这篇文章换源,也可以
......长按二维码访问原文
opencv_python的车牌识别_kooerr的博客-CSDN博客 2023-03-15 17:10:55
# 1 前言
? 基于python 机器视觉 的车牌识别系统
?学长这里给一个题目综合评分(每项满分5分)
难度系数:3分
工作量:3分
创新点:2分
选题指导,项目分享:
https://gitee.com/yaa-dc/warehouse-1/blob/master/python/README.md
1 课题背景
车牌识别其实是个经典的机器视觉任务了,通过图像处理技术检测、定位、识别车牌上的字符,实现计算机对车牌的智能管理功能。如今在小区停车场、高速公路出入口、监控场所、自动收费站等地都有车牌识别系统的存在,车牌识别的研究也已逐步成熟。尽管该技术随处可见了,但其实在精度和识别速度上还需要进一步提升,自己动手实现一个车牌识别系统有利于学习和理解图像处理的先进技术。
本文详细介绍基于深度学习
......长按二维码访问原文
图像缩放_c++ opencv 图片缩放_锡兰_CC的博客-CSDN博客 2023-07-22 10:49:27
文章目录 前言 图像缩放 基于等间距提取图像缩放 代码演示 基于区域子块提取图像缩放 代码演示
前言
图像的几何变换是指在不改变图像像素值的前提下对图像像素进行空间几何变换,常见的几何变换有距离变换、坐标映射、平移、镜像、旋转、缩放、仿射交换等等。图像的几何变换是图像处理和分析的基础,应用广泛。
图像缩放
图像缩放是指将图像的尺寸变小或变大的过程,也就是减少或增加源图像数据的像素个数。图像缩放一定程度上会造成信息的丢失,因此需要考虑适宜的方法进行操作。下面介绍两种常用的图像缩放的原理和实现。
基于等间距提取图像缩放
等间隔提取图像缩放是通过对源图像进行均匀采样来完成的。对于源图像数据 f(x,y),其分辨率为 MN,如果将其分辨率改变成 mn,对于等间隔采样而言,其宽度缩放因子 k1 = m /
......长按二维码访问原文
Python+OpenCV实现自动扫雷,挑战扫雷世界记录!_充电君的博客-CSDN博客 2023-07-31 12:16:38
目录
准备
- 扫雷软件
实现思路
- 01 窗体截取
- 02 雷块分割
- 03 雷块识别
- 04 扫雷算法实现
福利:文末 有Python全套资料哦
我们一起来玩扫雷吧。用Python+OpenCV实现了自动扫雷,突破世界记录,我们先来看一下效果吧。
中级 - 0.74秒 3BV/S=60.81
相信许多人很早就知道有扫雷这么一款经典的游(显卡测试)戏(软件),更是有不少人曾听说过中国雷圣,也是中国扫雷第一、世界综合排名第二的郭蔚嘉的顶顶大名。扫雷作为一款在Windows9x时代就已经诞生的经典游戏,从过去到现在依然都有着它独特的魅力:快节奏高精准的鼠标操作要求、快速的反应能力、刷新纪录的快感,这些都是扫雷给雷友们带来的、只属于扫雷的独一无二的兴奋点。
准备
准备动手制作一套扫
......长按二维码访问原文
opencv学习(一)图像的基本操作_cv2.color_bgr2gray_似水不惧的博客-CSDN博客 2023-03-06 15:04:33
OpenCV是一款开源的计算机视觉库,广泛用于数字图像处理、机器视觉、模式识别等领域。在OpenCV中,实现数字图像处理算法主要涉及以下步骤: 1.图像读取:使用OpenCV中的imread函数读取图像并转换为灰度图或彩色图像。 2.图像预处理:根据具体需求进行图像预处理,如去噪、图像增强、灰度化等操作。 3.特征提取:使用OpenCV提供的各种特征提取算法,如SIFT、SURF、HOG等,提取图像中的特征信息。 4.目标检测与识别:通过对提取的特征信息进行分类识别,实现数字图像处理的目标检测与识别。 5.算法优化:通过算法优化和参数调节,提高数字图像处理算法的准确性和效率。 在使用OpenCV实现数字图像处理算法时,需要掌握基本的图像处理知识和编程技巧,同时还需要了解并学习OpenCV中提供的各种函数和算法。
......长按二维码访问原文
OpenCV-Python学习(21)—— OpenCV 图像几何变换之图像翻转(cv.flip、np.flip)_opencv 图像上下翻转_Rattenking的博客-CSDN博客 2023-02-24 09:00:26
您可以使用Python的OpenCV库来沿对角线翻转图像。下面是一个示例代码: ```python import cv2 def flip_image_diagonal(image): # 获取图像的宽度和高度 height, width = image.shape[:2] # 创建一个新的图像,大小与原图像相同 flipped_image = np.zeros_like(image) # 沿对角线翻转图像 for i in range(height): for j in range(width): flipped_image[i, j] = image[height - 1 - i, width - 1 - j] return flipped_image # 读取图像 image = cv2.imread('
......长按二维码访问原文
【OpenCV】高精度识别圆(支持复杂场景下的圆)_opencv识别圆形_遇见流光的博客-CSDN博客 2022-10-24 00:01:40
EasyPR是一个中文的开源车牌识别系统,其目标是成为一个简单、高效、准确的车牌识别引擎。相比于其他的车牌识别系统,EasyPR有如下特点:* 它基于openCV这个开源库。这意味着你可以获取全部源代码,并且移植到java等平台。* 它能够识别中文。例如车牌为苏EUK722的图片,它可以准确地输出std:string类型的"苏EUK722"的结果。* 它的识别率较高。图片清晰情况下,车牌检测与字符识别可以达到80%以上的精度。 EasyPR是一个开源的中文车牌识别系统,其目标是成为一个简单、高效、准确的非限制场景(unconstrained situation)下的车牌识别库。 相比于其他的车牌识别系统,EasyPR有如下特点: 它基于openCV这个开源库。这意味着你可以获取全部源代码,并且移植到opencv
......长按二维码访问原文
在PyCharm中搞定python opencv自动补全_pycharm opencv 自动补全_Gaofei1031的博客-CSDN博客 2022-11-14 15:32:09
因为python是动态语言,变量类型是可变的,所以不管pycharm还是sublime都做不到准确的类型推断。 一个比较取巧的做法是assert assert isinstance(a, A_type) a. # 可以补全 补充知识:pycharm 第三方库函数无代码提示解决方案 问题描述 呃呃呃,想使用urllib库进行HTTP 调用,然后发现有些地方没有代码提示。。。这就很难受了,我根本不清楚API的,你不给我一点提示就过分了呀!!! from urllib import request def demo(): s = request.urlopen('http://
......长按二维码访问原文
opencv的Mask操作,选择图片中感兴趣的区域_computer_vision_chen的博客-CSDN博客 2023-08-02 10:14:45
OpenCV是一种广泛使用的计算机视觉库,可以用于各种计算机视觉任务,例如对象识别、图像处理和计算机视觉等。在OpenCV中,mask是一种使用特定值显示图像区域的技术。对于任何计算机视觉任务,都可能需要使用掩码技术,以便仅对图像的特定区域进行处理。 掩码技术是一种用于选择处理图像中特定区域的技术,掩码通常为二进制图像,其中为0的部分表示要忽略的区域,而为255的部分表示要处理的区域。掩码可以是手动创建的,即通过绘制图像来指定要处理的区域,也可以是通过OpenCV函数自动生成的,例如阈值化的输出图像。 掩码通常与其他OpenCV函数一起使用,例如利用掩码进行图像加权平均。掩码也可以用于基于形状的筛选,例如在检测图像中的对象时确定感兴趣区域。 总之,OpenCV mask是一种在计算机视觉中非常常见的技术,可以用
......长按二维码访问原文
计算机视觉实战--OpenCV进行红绿灯识别_opencv红绿灯颜色识别_是Dream呀的博客-CSDN博客 2023-05-30 15:07:45
前言: Hello大家好,我是Dream。 OpenCV是一个开源的计算机视觉库,可以用于实现各种图像和视频处理任务,包括红绿灯识别。可以帮助自动驾驶汽车、智能交通系统等设备准确地识别红绿灯的状态,以便做出正确的决策。今天,就有Dream带领大家复盘一下计算机视觉中最经典的实验:OpenCV进行红绿灯识别,一起来看看吧~
红绿灯分为导向灯和圆形灯。一般圆形灯在路口只有一盏灯,红灯亮时禁止直行和左转,可以右转弯。导向灯市带有箭头的,可以有两个或三个,分别指示不同方向的行车和停车。按指示的灯即可,没有右转向导向灯的情况下可以视为可以右转。
RGB颜色空间以R(Red:红)、G(Green:绿色)、 B(Blue:蓝)三种基本色为基础,进行不同程度的叠加,产生丰富而广泛的颜色,所以俗称三基色模式。在大自然中有无穷
......长按二维码访问原文
【opencv+图像处理】(Gui Features in OpenCV) 1-1摄像头:采集摄像头视频,读取视频帧,录制视频_opencv摄像头图像采集并处理图像_cv夏一笑的博客-CSDN博客 2023-05-07 07:15:00
本专栏代码总库地址 https://github.com/xiawei20161308104/xv_opencv_tutorials
本节代码路径 xv_opencv_tutorials/VideoRelated/get_started_with_videos.py xv_opencv_tutorials/VideoRelated/get_and_set_video.py xv_opencv_tutorials/VideoRelated/save_video.py
参考官网 https://docs.opencv.org/4.x/d6/d00/tutorial_py_root.html
从设备,可以是摄像头可以是本地视频,获取视频的函数 cv.VideoCapture() ❗️本函数作用在于创建一个 Vi
......长按二维码访问原文
图像噪声、去噪基本方法合集(Python实现)_python 图像去噪_Vaeeeeeee的博客-CSDN博客 2023-03-21 23:53:30
前言
本文主要参考冈萨雷斯的数字图像处理 (第4版),介绍图片中一些常见的噪声形式和常用的去噪方法,并且给出相应滤波方法的实现代码。
如果要使用本文代码,建议在Jupyter Notebook环境下运行。
指服从高斯分布(正态分布)的一类噪声,其产生的主要原因是由于相机在拍摄时视场较暗且亮度不均匀造成的,同时相机长时间工作使得温度过高也会引起高斯噪声,另外电路元器件白身噪声和互相影响也是造成高斯噪声的重要原因之一。
概率密度函数(PDF)如下:
初始图片:
注意加噪声时,不能直接将 noise+img,不然最终出来的是一片空白和零星几个噪点,原因在于cv2.imshow输入要求是 0-1 float 或者 0-255 int 。
(1)错误显示:
(2)正确显示:
import
......长按二维码访问原文
谈谈如何使用 opencv 进行图像识别_opencv 图像识别_TesterHome官方的博客-CSDN博客 2022-04-25 19:02:08
从18年开始,我接触了叉叉助手(平台已经被请喝茶了),通过图色识别,用来给常玩的游戏写挂机脚本,写了也有两三年.也算是我转行当游戏测试的理由.
去年11月,也是用了这身技术,混进了外包,薪资还不错,属于是混日子了,岗位是在发行,接触到很多游戏,因为接不了poco,到手只有apk,
日积月累,游戏越来越多,项目组却还是只有这点人.为了减轻自己的压力,就开始了UI自动化的不归路.
因为游戏引擎,是无法通过appium等框架去获取,如果不接入一些SDK,那么识别的方法只有图像识别.现在常见的开源框架
网易的Airtest,通过传统识别进行自动化,还有airtestIDE可以简单快速的编写airtest代码 腾讯GameAISDK,通过深度学习进行自动化(没用过,好久不维护了) 阿里的SoloPi,主要功能是录
......长按二维码访问原文
Opencv 视频的读取与写入_缺点灵气儿的博客-CSDN博客 2023-08-20 21:12:54
在OpenCV中读写视频与读写图像非常相似。视频就是一系列通常被称为帧的图像。所以,你需要做的就是循环播放视频序列中的所有帧,然后一次处理一帧。在这篇文章中,我们将演示如何从一个文件、一个图像序列和一个网络摄像头读取、显示和写入视频。我们还将研究流程中可能发生的一些错误,并帮助理解如何解决这些错误。 让我们先看一下读取视频文件的代码示例。它本质上包含了从磁盘读取视频并显示它的功能。随着您的深入,我们将详细讨论这个实现中使用的函数。 Python import cv2 # Create a video .
......长按二维码访问原文
基于Opencv的卡尺找线_opencv卡尺工具_一个没有素质的人的博客-CSDN博客 2022-06-24 19:05:21
首先, 边缘点的提取主要学习的是VisionPro的CogCaliperTool工具的原理。 之后,获得边缘点集之后,用RANSAC算法把异常点筛选出来。RANSAC的算法原理参考RANSAC算法(附RANSAC直线拟合C++与Python版本),有做小小地修改,根据以下公式计算迭代次数: k = l o g ( 1 − p ) l o g ( 1 − w n ) k=\frac{log(1-p)}{log(1-w^n)} k = l o g ( 1 − w n ) l o g ( 1 − p ) 。
void CCaliperGraphics :: RansacLineFiler ( const vector < Point2d > & points , vector < Point2d > & vpd
......长按二维码访问原文

使用Python和OpenCV实现身份证识别_python 证件识别_loriby的博客-CSDN博客 2023-04-05 09:30:00
Python是一种功能强大的编程语言,可以用于各种各样的应用场景,包括身份证识别。在本文中,我们将介绍如何使用Python来识别身份证,并提供一个示例代码来演示这个过程。
身份证识别原理
身份证是中国公民的重要证件,包含了个人的基本信息,如姓名、性别、出生日期、民族、住址等。身份证的识别过程通常分为两步:首先要找到身份证的位置,然后提取出身份证上的文字信息。
身份证的位置可以通过图像处理算法来实现。常用的方法包括边缘检测、色彩空间转换、模板匹配等。一旦找到了身份证的位置,就可以使用光学字符识别(OCR)算法来提取身份证上的文字信息。OCR算法可以将图像中的文字转换为计算机可读的格式,例如文本字符串或数字。
在本文中,我们将使用Python和一些流行的Python库来实现身份证识别。具体来说,我们将使用O
......长按二维码访问原文
【图像处理】看OpenCV如何实现相机校准_opencv 相机校准_无水先生的博客-CSDN博客 2023-07-04 14:17:51
一、说明
在本教程中,将介绍计算机视觉的科学领域,以及相机校准过程的简要总结。计算机视觉是实现自主系统的尝试,这些系统可以实现“人类视觉”的某些功能,其中相机被认为是传感器之一(相当于人眼)。了解捕获图像的内容是一项关键任务,这些计算机视觉系统有几个共同的应用程序:例如分类、识别和对象跟踪。在开始任何其他任务之前,开发计算机视觉系统时的重要事项之一是相机校准。在本教程中,我们将重点介绍此过程的重要性。
二、相机校准原理
相机的几何校准(相机校准)基于对相机、视频和/或图像的镜头/传感器分布参数的估计。
您可以在下面找到以更理论的方式执行从相机中消除失真的过程所需的主要步骤。此信息基于 OpenCV 开源库和 Matlab R2021a 软件提供的文档。
关于Geekering“计算机视觉”类别的进一步
......长按二维码访问原文
python opencv环境配置 保姆级教程_python环境配置opencv_紫金小飞侠的博客-CSDN博客 2022-11-05 14:31:42
链接:https://pan.baidu.com/s/1SwE0nmHI5D7uFc–Z0Bndw
提取码:1234
双击运行
我们这里选择只为当前用户安装,如果为所有用户安装,不能直接双击打开,需要右键以管理员身份运行
检conda 是否安装成功
查看conda的版本号
常用虚拟环境管理命令
查看所有环境
conda env list
刚安转只有一个基础环境,目前我们就是基础环境中
创建环境
conda create -- name 环境名称 ( 必须英文 )
进入环境
conda activate 环境名称
退出环境
conda deactivate
删除环境
conda remove -- name 环境名称 -- all
创
......长按二维码访问原文
OpenCV获取网络摄像头实时视频流_opencv读取网络摄像头_处女座_三月的博客-CSDN博客 2023-05-13 16:12:30
参考文章:
方式一: 使用VideoCapture读取视频流
在使用OpenCv处理视频时,无论是视频文件还是摄像头画面,都要使用VideoCapture类来进行每一帧图像的处理。当我们使用视频文件作为参数时,OpenCv则打开视频文件,进行每一帧画面的读取。当我们传递摄像机编号时,OpenCv则打开相机,实时读取相机画面。
获取VideoCaptrue实例:
# 读取视频文件 cv2.VideoCapture('video.mp4') # 打开摄像机 cv2.VideoCapture(0)
使用VideoCapture读取海康RTSP流
RTSP流
在使用OpenCv进行计算机视觉处理时,我们很多时候需要连接外部相机,如海康威视。监控相机的常见视频传输协议有:RTSP、RTMP(以RTSP为主)
......长按二维码访问原文
【OpenCV • c++】图像几何变换 2023-07-15 07:42:59
前言
图像的几何变换是指在不改变图像像素值的前提下对图像像素进行空间几何变换,常见的几何变换有距离变换、坐标映射、平移、镜像、旋转、缩放、仿射交换等等。图像的几何变换是图像处理和分析的基础,应用广泛。
图像平移
图像的平移操作是将图像的所有像素坐标进行水平或垂直方向移动,也就是将所有像素点按照给定的偏移量在水平方向沿 x 轴、垂直方向上沿 y 轴移动。平移变换分为两种类型:图像大小变化与图像大小不变。第一种类型保证图像平移的完整信息,第二种图像导致原始图像的部分信息可能丢失。
平移原理
我们对图像进行逐像素操作,遍历需要平移的图像,将需要平移的图像的每个像素点进行操作,存储在返回图像中,实现平移操作。
代码演示
在这里,我们设置返回图像的大小,遍历需要平移的图像的每个像素点,存储在返回图像中,最后
......长按二维码访问原文
基于YOLO目标检测及OpenCV实现的游戏代玩人工智能体(Auto Gaming Agent) [4]_yolo 加什么编译器能自动游戏_陆子祥的博客-CSDN博客 2022-06-16 01:39:26
一般电脑上的游戏操作主要依靠键盘和鼠标,而达成自动操作键鼠一般不会真正控制实体的键鼠,因为难度太大了,所以一般采用软件模拟的方式来控制虚拟的键盘和鼠标,最终目的都是让游戏系统准确的知道你的操作意图。
比较常用的虚拟键盘和鼠标的pip库是 keyboard 和 mouse ,小巧又不失强大,基本的控制、捕捉、热键设置都能实现。当然如果追求性能和游戏兼容性可以使用另一个库 pydirectinput ,使用了Windows的DirectX驱动中的DirectInput API,基本所有windows平台的游戏都会用这个API来获取玩家的键鼠输入,所有这个库是键鼠操作的终极方案,因为大部分游戏不支持 mouse 库直接移动角色的镜头视角。
不过 pydirectinput 使用起来不那么方便,偶尔有些小bug,所
......长按二维码访问原文
(已修正精度 1mm左右)Realsense d435i深度相机+Aruco+棋盘格+OpenCV手眼标定全过程记录_aruco 定位精度_Fr0mdeepsea的博客-CSDN博客 2023-05-12 19:39:01
最近帮别人做了个手眼标定,然后我标定完了大概精度能到1mm左右。所以原文中误差10mm可能是当时那个臂本身的坐标系有问题。然后用的代码改成了基于python的,放在下面。
新来的小伙伴可以只参考前面的代码就可以完成标定了。
有问题的话可以留言,一起交流~
手眼标定需要的内容:
1.不同姿态下拍摄棋盘格的照片若干张(我用了10张)
2.记录下机械臂的姿态格式为(x,y,z,rx,ry,rz)其中姿态为rpy角,单位为deg, 需要保存成excel文件
代码中需要修改的内容:
1.相机内参矩阵 self.K 以及畸变参数
2.棋盘格尺寸
3.存放img和excel的路径
import os import cv2 import xlrd2 from math import * import num
......长按二维码访问原文
基于OpenCV的人脸识别_爱吃饼干的小白鼠的博客-CSDN博客 2023-03-27 00:28:23
对于同一层来说,他们提取特征的方式是一样的,第三层的神经元都是用来提取“眼睛”的特征,因此,需要计算的参数是一样的。,w100],这就是权值共享。容易得出,无论有多少神经网络层,输出都是输入的线性组合,与没有隐层的效果是一样的,这就是最原始的感知机了。在初次尝试进行模型训练时,没有对图片进行细节处理以及数据提升,虽然模型准确率很高,但当使用摄像头进行识别时,会存在识别不准确的情况,因此后面增加了对图像的细节处理以及数据提升处理,预测效果达到预期值,模型最高准确率达到99.93%,损失率0.0067。...
......长按二维码访问原文
ROS与opencv的图像转换cv_bridge_ros 转opencv_sicbe559的博客-CSDN博客 2023-01-06 17:35:14
ROS与opencv的图像转换
ROS为开发者提供了与OpenCV的接口功能包——cv_bridge,通过该功能包将ROS中的图像数据转换成OpenCV格式的图像,并且调用OpenCV库进行各种图像处理;或者将OpenCV处理过后的数据转换成ROS图像,通过话题进行发布,实现各节点之间的图像传输。
例如,一个ROS节点订阅摄像头驱动发布的图像消息,然后将其转换成OpenCV的图像格式进行显示,最后再将该OpenCV格式的图像转换成ROS图像消息进行发布并显示。
$ roslaunch robot_vision usb_cam.launch $ rosrun robot_vision cv_bridge_test.py $ rqt_image_view
实现该例程的源码robot_vision/scrip
......长按二维码访问原文
(九)相机内参、外参、反透视变换python opencv_shiyueyueya的博客-CSDN博客 2023-03-08 17:58:06
背景知识
任务需求:将相机上的一个点投影到真实世界平面上去。
原则上单目相机是不可以的,因为只记录了二维信息,真实世界是三维的,双目相机可以通过视差,或者单目+IMU组合,但是由于特征点在地面上的先验知识,因此可以进行反透视变换。方法有很多种那个,这里采用计算相机的内参和外参的方法。基础知识理论在视觉slam14讲中有详细说明,但是其代码是c++这里采用python opencv实现。
相机内参外参标定:https://blog.csdn.net/qq_29931565/article/details/119395353
逆投影,roadmap:https://blog.csdn.net/qq_53086461/article/details/128028199
需要安装提前安装好numpy、glob
......长按二维码访问原文
OpenCv-Python学习笔记(九):形态学转换_cv2.erode_笨鸟未必先飞的博客-CSDN博客 2022-03-01 22:11:01
目录
腐蚀
膨胀
开运算
闭运算
形态学梯度
礼帽
黑帽
形态学操作的关系
构建椭圆/圆形的核
形态学操作是根据图像形状进行的简单操作。一般情况下对二值化图像进 行的操作。需要输入两个参数,一个是原始图像,第二个被称为结构化元素或 核,它是用来决定操作的性质的。两个基本的形态学操作是腐蚀和膨胀。他们 的变体构成了开运算,闭运算,梯度等。
腐蚀
就像土壤侵蚀一样,这个操作会把前景物体的边界腐蚀掉。这是怎么做到的呢?卷积核沿着图像滑动,如果与卷积核对应的图像的所有像素值都是1,那么该区域的所有像素值就是1,否则为0。用于去除白噪声和断开两个连在一起的物体等。用到的函数是cv2.erode()。
第一个参数表示输入图像。
第二个参数表示定义的卷积核。
第三个参数表示迭代腐蚀的次数,通俗的
......长按二维码访问原文
【Android App】人脸识别中借助摄像头和OpenCV实时检测人脸讲解及实战(附源码和演示 超详细)_opencv for andriod 人脸识别_showswoller的博客-CSDN博客 2022-12-03 09:31:40
基于opencv的人脸识别和口罩检测,附有代码和报告,运用PCA和LBP等算法和处理方法。 基于opencv的人脸识别和口罩检测,附有代码和报告,运用PCA和LBP等算法和处理方法。 基于opencv的人脸识别和口罩检测,附有代码和报告,运用PCA和LBP等算法和处理方法。 基于opencv的人脸识别和口罩检测,附有代码和报告,运用PCA和LBP等算法和处理方法。 基于opencv的人脸识别和口罩检测,附有代码和报告,运用PCA和LBP等算法和处理方法。 基于opencv的人脸识别和口罩检测,附有代码和报告,运用PCA和LBP等算法和处理方法。 基于opencv的人脸识别和口罩检测,附有代码和报告,运用PCA和LBP等算法和处理方法。 基于opencv的人脸识别和口罩检测,附有代码和报告,运用PCA和LBP等算
......长按二维码访问原文
OpenCV第七篇:车牌识别_opencv车牌识别_苍穹之跃的博客-CSDN博客 2023-02-21 17:33:29
使用openCV识别车牌 流程框架 图像的预处理 车牌定位的第一步为图像预处理。为了方便计算,系统通常将获取的图片灰度化。将彩色图像转化成为灰度图像的过程就称为图像的灰度化处理。彩色图像中R、G、B三个分量的值决定了具体的像素点。一个像素点可以有上千万种颜色。而灰度图像是一种彩色图像,但是它的特点在于R、G、B三个分量具体的值是一致的。灰度图中每个像素点的变化区间是0到255,由...
......长按二维码访问原文
OpenCV图像特征提取学习四,SIFT特征检测算法_opencv sift_肖爱Kun的博客-CSDN博客 2022-11-27 19:31:41
一、SIFT特征检测概述
SIFT的全称是Scale Invariant Feature Transform,尺度不变特征变换,由加拿大教授David G.Lowe提出的。SIFT特征具有对旋转、尺度缩放、亮度变化等保持不变性,是一种非常稳定的局部特征。
1.1 SIFT算法具的特点
图像的局部特征,对旋转、尺度缩放、亮度变化保持不变,对视角变化、仿射变换、噪声也保持一定程度的稳定性。 独特性好,信息量丰富,适用于海量特征库进行快速、准确的匹配。 多量性,即使是很少几个物体也可以产生大量的SIFT特征 高速性,经优化的SIFT匹配算法甚至可以达到实时性 扩招性,可以很方便的与其他的特征向量进行联合。
1.2 SIFT特征检测的步骤
尺度空间的极值检测 搜索所有尺度空间上的图像,通过高斯微分函数来识别潜
......长按二维码访问原文

一文带你安装opencv和常用库(保姆级教程少走80%的弯路)_安装opencv库_小叶同学0513的博客-CSDN博客 2023-03-12 22:42:14
离上一个opencv安装保姆级教程发布已经过去了快一年了,这一年来我收到了来自很多C友的鼓励。打算学opencv的各位朋友都会在安装opencv和各种库过程中浪费掉60%的时间和精力;博主在这一年来尝试各种各样的安装方法,全网搜集各种资料总结了一篇非常详细的opencv和常用库的安装教程,若有帮助记得三连,你的三连是我进步的动力。
1. 正文
本文我会通过miniconda+jupyter lab的形式带大家安装opencv;
有很多朋友会问为什么不是anaconda+jupyter lab 或者直接pycharm 来安装呢?在这里我回答一下大家的疑问,通过这一年来的学习和实战,我发现anaconda它带了很多不必要的库并且自身很重,像我这样只能买得起轻薄本的学生党连跑demo都跑不了;pycharm也是
......长按二维码访问原文
数字图像处理(入门篇)十四 透视变换_Jackilina_Stone的博客-CSDN博客 2022-12-12 23:10:41
目录
一 透视变换
二 实践
(1)代码
(2)结果图
一 透视变换
现实生活中的空间是三维的,图像中的物体存在近大远小的特征,这种畸变仿射变换不能矫正。因此,我们需要使用到三维空间的变化,就是透视变换。透视变换(Perspective Transformation)的本质是将图像投影到一个新的视平面。
透视变换是非线性变换。透视变换公式如下:
从上述公式可知,变换矩阵有8个参数,因此要确定4个像素点变换前后的对应坐标才能够求出透视变换矩阵。
二 实践
(1)代码
import cv2 import matplotlib.pyplot as plt import numpy as np # 获取透视变换的参数矩阵 def cal_perspective_params(img, points
......长按二维码访问原文
OpenCV在工业自动化领域的运动控制与仿真_opencv 工业_禅与计算机程序设计艺术的博客-CSDN博客 2023-07-14 02:26:04
作者:禅与计算机程序设计艺术
OpenCV(Open Source Computer Vision Library)是一个开源跨平台计算机视觉库。它为程序员提供了很多基础性的图像处理、机器学习和计算机视觉方面的功能,可以用于开发各种应用场景,包括基于移动设备的视觉分析、工业自动化等。它的跨平台特性,使其能够应用于各个领域,如安防监控、智能建筑、无人机、车队管理等。本文将详细介绍OpenCV在工业自动化领域中的运动控制与仿真的相关技术知识。
2.1 机器人动力学模型
在进行工业自动化领域的应用时,经常需要考虑如何控制机器人的运动,控制方法主要分为位置控制和速度控制。通过位置控制可以实现机器人精确地移动到目标坐标点,速度控制则可以通过设置一个最大速度来控制机器人的加速或减速过程,以达到精确控制目标轨迹
......长按二维码访问原文
Ubuntu 20.04下搭建C++ & OpenCV 4.6.0 & cmake编译_ubuntu20.04安装opencv c++_s弦风w的博客-CSDN博客 2022-10-13 19:57:22
前言:这篇文章记录了我在Ubuntu重新搭建OpenCV,c++环境。后续会补充opencv-python、深度学习、ROS环境配置,使之相互兼容。具体操作和安装包在文章中都有,不同版本的安装过程大同小异。
搭建过程共分为以下几大部分:1. 换国内源;2. 安装依赖项;3. 下载OpenCV源文件;4. 配置、编译、安装OpenCV;5. 配置环境;6. demo测试;7. 简单项目测试;8. 其他
换国内源
这是使用Linux系统的必要操作,自行查询
安装依赖项
安装g++, cmake, make, wget, unzip
sudo apt install -y g++ sudo apt install -y cmake sudo apt install -y make sudo apt ins
......长按二维码访问原文
迈德威视MindVision相机配置文件的保存与加载/相机参数移植_洞观视觉的博客-CSDN博客 2023-02-06 15:34:24
我们会遇到这样的情况,在一台电脑上(如我们自己的笔记本)安装了MindVision相机的驱动软件,想要使用MindVision相机成像。在我们搭建的成像环境下,假设想要对螺栓进行成像,我们可能调试出了一套合适的相机参数,包括曝光、增益等,然后在此基础上采集图像、进行后续的图像处理等,最终搭建了一套完整的螺栓缺陷视觉检测系统。当我们把这套系统交付给客户后,肯定不能把自己的笔记本也给客户,所以我们通常要在客户的电脑上重新安装MindVision相机的驱动软件,并调节好之前确定的相机成像参数。这对于客户只需要一套系统的情况没有任何问题,但当客户需要几十上百套系统,那么每次对每台电脑上的MindVision相机驱动软件单独调节各个相机参数(参数有时会很多)就是一项非常繁重的工作;甚至有时客户在其它城市,没有条件让你去现
......长按二维码访问原文