文章目录[隐藏]
- 行业资讯
- 您的 2024 年 6 大计算机视觉问题指南:2024-02-14T13:41:54+00:00
- 论文分享:《NeRV: Neural Reflectance and Visibility Fields for Relighting and View Synthesis》 2024-02-14 02:10
- 【论文精读】DINO 2024-02-14 14:21
- CVPR 2024 Precognition Workshop CfP 诚邀赐稿 2024-02-15 10:22
- 计算机与机器视觉中的高精度相机标定 2024-02-15 09:44
- 论文阅读:通过加权神经元分配的脉冲神经网络进行视觉地点识别 2024-02-14 22:43
- 三维重建 3D reconstruction 有哪些实用算法? 2019-09-06 06:47
- 卷积神经网络 (CNN) 简介:2021-05-01T14:42:07+00:00
- 杂货店曼达尔:14.0.0
- 在 NVIDIA Jetson Orin 上的 RTSP 流上运行计算机视觉模型:2024-02-15T08:57:36.000Z
- YOLO-NAS:计算机视觉中目标检测的下一个前沿:2024-02-14T17:03:45.000Z
行业资讯
您的 2024 年 6 大计算机视觉问题指南:2024-02-14T13:41:54+00:00

介绍
计算机视觉是人工智能的最新子集,近年来需求激增。这要归功于我们今天拥有的令人难以置信的计算能力和大量的数据可用性。我们都在日常生活中以某种形式使用过计算机视觉应用程序,比如我们移动设备上的面部解锁
...... 长按二维码访问原文

论文分享:《NeRV: Neural Reflectance and Visibility Fields for Relighting and View Synthesis》 2024-02-14 02:10
设置
一组无约束且已知照明的场景图像作为输入,并生成 3D 表示作为输出,该 3D 表示可以在任意照明条件下从新颖的视点进行渲染,包括单次反射的间接照明效果。
本文中已知照明指的是给出环境贴图(Environment Map)的照明。
问题
如果我们在NeRF中想要对环境光源或全局照明进行建模,那么这个过程很快就会变得非常昂贵,在这种情况下,场景点可能会从各个方向被照亮。
现有的从图像估计可重新照明体积表示的方法尚未克服这一挑战,并且只能在训练时模拟来自单点光源的直接照明。
在标准光线跟踪图形框架中,场景几何形状是固定的并且提前已知,常见的解决方案是预先计算可以有效查询的数据结构(如八叉树),以获得场景点对之间或场景点与光源之间的可见性。这些现有的方法并没有为我们的任务提供解决方案——我们的几何形状
......长按二维码访问原文

【论文精读】DINO 2024-02-14 14:21
摘要
基于对ViT在监督学习领域的表现质疑,探究自监督方法下的ViT是否具有更好的特征提取能力,进而发现:
自监督ViT特征包含场景布局、对象边界。这些信息可以在最后一自注意力模块中直接访问。
自监督ViT特征结合最近邻分类器(k-NN)分类头中表现很好,无需任何微调、线性分类器或数据增强,在ImageNet上实现了78.3%的最高精度。
自监督下ViT可以比卷积网络获得更多有用的语义信息。
算法框架
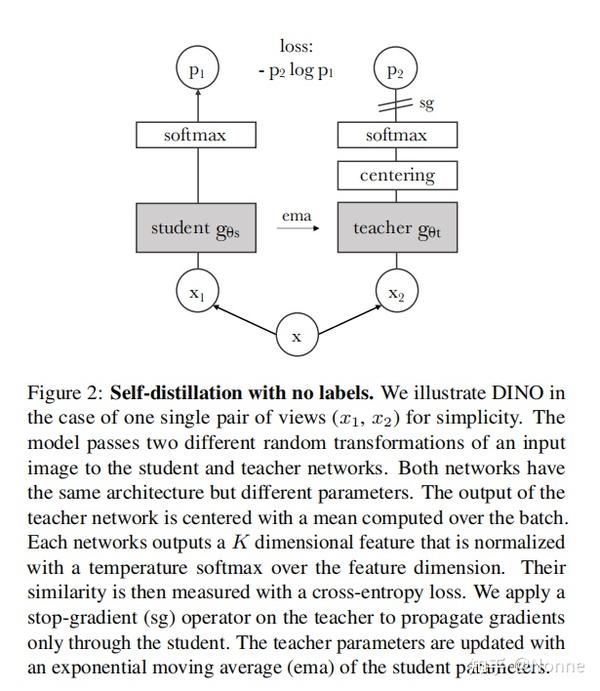
SSL with Knowledge Distillation
input
定义学生网络 g_{\theta_s} 和教师网络 g_{\theta_t} 两个网络,参数表示为 \theta_s 、 \theta_t ,两者体系结构相同,但参数不同。在教师网络上应用停止梯度(sg)算子。具体如下:
......长按二维码访问原文

CVPR 2024 Precognition Workshop CfP 诚邀赐稿 2024-02-15 10:22
大家好,第六届CVPR 2024 Precognition Workshop已经上线,我是今年的组织者以及workshop chair。Precognition Workshop专注于视觉预测研究,欢迎感兴趣的研究者踊跃投稿,目前投稿系统已开放,截止日为2024年3月24日。届时长文将在CVPR workshop上进行oral presentation,同时我们会评选出Best Paper Award。Workshop网站:
https://sites.google.com/view/ieeecvf-cvpr2024-precognition
Keynote Speaker 主题演讲:
目前我们很荣幸邀请到了上海人工智能实验室的李弘扬博士、斯坦福大学的James Zou教授以及Aurora的Louis F
......长按二维码访问原文

计算机与机器视觉中的高精度相机标定 2024-02-15 09:44
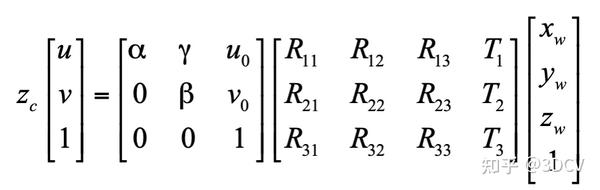
时间过得好快。自从完成了这篇关于高精度相机标定的文章的上半部分以来,两个多月过去了。这两个多月,我每天忙忙碌碌地做着各种工作,这其中也有一些相机标定的工作。转眼已经11月,美国各大商店也早已摆满了节日相关的商品。于是我蹬开被窝,决定把这下半部分写完,这样今年年底以前还能够有空完成下一篇文章。在上半部分里,我描述了针孔成像的原理、相机成像的模型、以及相机标定的基本原理。在这下半部分,我将介绍相机标定的具体实施和几个基本的应用。
移步公众号「3DCV」第一时间获取工业3D视觉、自动驾驶、SLAM、三维重建、最新最前沿论文和科技动态。
推荐阅读
1、重磅发布!3D视觉系统学习路线总结!
2、基于NeRF/Gaussian的全新SLAM算法
3、面向自动驾驶的BEV与Occupancy网络全景解析与实战
......长按二维码访问原文

论文阅读:通过加权神经元分配的脉冲神经网络进行视觉地点识别 2024-02-14 22:43
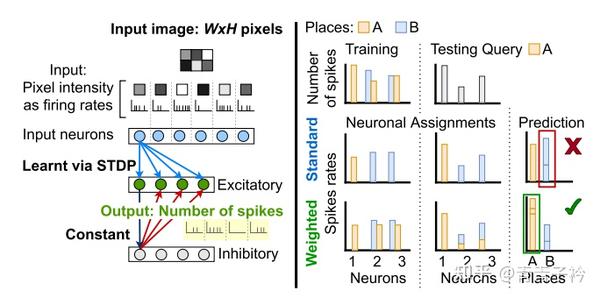
论文详细信息:Hussaini S, Milford M, Fischer T. Spiking neural networks for visual place recognition via weighted neuronal assignments[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 4094-4101.
摘要
脉冲神经网络(SNNs)提供了引人注目的潜在优势,包括能源效率和低延迟,但也面临着挑战,包括事件脉冲的非可微性质。在这一领域的许多初期研究都是将深度神经网络转换为等效的SNNs,但这种转换方法可能抵消了从头开始开发的SNN方法的一些优势。高性能SNNs的一个有前景的领域是模板匹配和图像识别。本研究引入了第一个用于视
......长按二维码访问原文

三维重建 3D reconstruction 有哪些实用算法? 2019-09-06 06:47
最近在学习multiview geometry TMU course: multiview geometry,借此问题总结一下我认为比较实用的算法和知识点并分享给大家, 分享的内容更侧重于公式的推导。
欢迎斧正!
0 三维重建
0.1 必要条件
输入一组图片,三维重建能够输出一个3D scene structure,与此同时也能够得到相片的姿态 pose(也被成为相机姿态,即6DoF 姿态, 包括位置和朝向)。 而能够进行三维重建的必要条件有:
所重建的场景是静态的,即3D points 在相机移动的时候保持静止。
两张图片之间存在overlap。指你得能从两张图片找到correspondces (匹配的点对)。
相机内参 (K)是已知, 所以我下面所说的二维坐标 x 指的就是,消除内参的坐标 (
......长按二维码访问原文

卷积神经网络 (CNN) 简介:2021-05-01T14:42:07+00:00
介绍
在过去的几十年里,深度学习已被证明是一个非常强大的工具,因为它能够处理大量数据。使用隐藏层的兴趣已经超越了传统技术,尤其是在模式识别方面。最流行的深度神经网络之一是卷积神经网络(也称为 CNN 或 ConvNe
...... 长按二维码访问原文

杂货店曼达尔:14.0.0
我们在 Analytics Vidhya 网站上使用 cookie 来提供服务、分析网络流量并改善您在网站上的体验。使用 Analytics Vidhya,即表示您同意我们的隐私政策和使用条款
...... 长按二维码访问原文

在 NVIDIA Jetson Orin 上的 RTSP 流上运行计算机视觉模型:2024-02-15T08:57:36.000Z
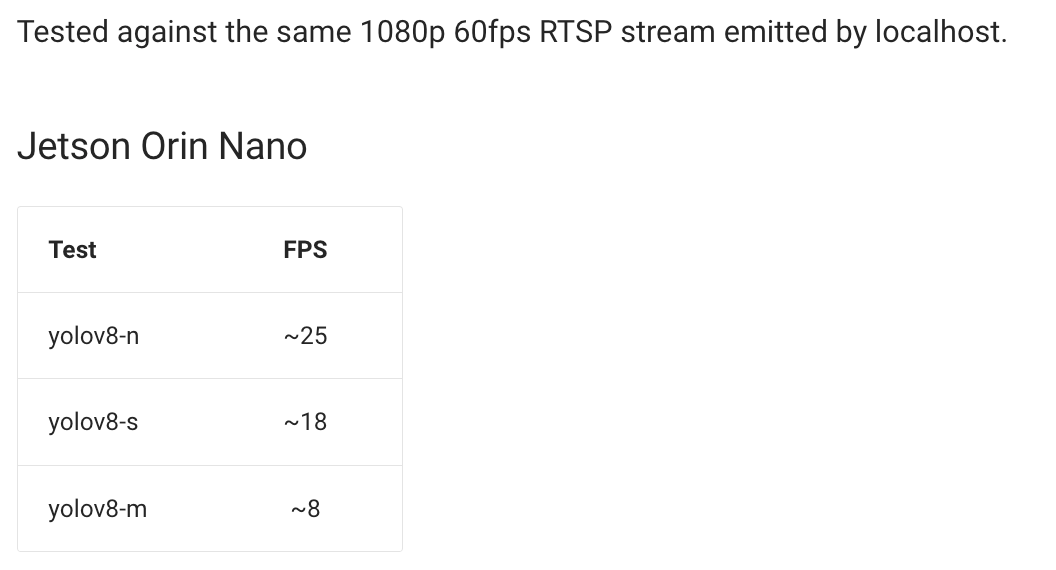
Roboflow 推理管道是托管推理 API 的直接替代品,可以部署在您自己的硬件上。Inference Pipeline 接口专为流式处理而设计,可能是实时用例的最佳途径。它是一个异步接口,可以使用许多不同的视频源,包括本地设备(如网络摄像头)
...... 长按二维码访问原文

YOLO-NAS:计算机视觉中目标检测的下一个前沿:2024-02-14T17:03:45.000Z
让这个项目栩栩如生 在 Paperspace 上运行
Deci AI 的 YOLO-NAS 以其尖端的基础模型标志着目标检测领域的进步。由于先进的神经架构搜索技术,YOLO-NAS克服了早期YOLO模型中的空白,因此该模型脱颖而出。该模型成功带来了显着的增强
...... 长按二维码访问原文






