全球塑料产量已超过5亿吨。此外,美国环境保护署的估计表明,所有生产的塑料中有30%最终将进入海洋。
考虑到这一点,来自科罗拉多州立大学蒙特利湾分校,海洋清理和加州大学圣地亚哥分校的研究人员Gautam Tata,Sarah-Jeanne Royer,Olivier Poirion和Jay Lowe考虑了计算机视觉如何在保持海洋清洁方面发挥作用。
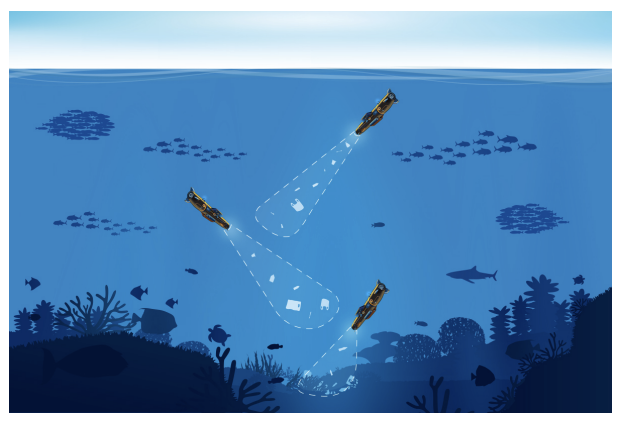
该小组最近发表了他们的发现:DeepPlastic:一种检测Epeplagigic Bound的新方法。在这篇论文中,研究小组考虑了如果负责自动识别和收集水下塑料,自主水下航行器(AUV)的功效可能是什么样子。
该团队专注于评估基于深度学习的水下塑料识别方法的准确性。
值得注意的是,研究人员专注于从现实世界的条件中收集数据集:
该数据集是根据加利福尼亚州三个地点(南太浩湖,博德加湾,旧金山湾)拍摄的图像以及由研究机构在互联网上托管的图像汇编构建的,以增加不同地点海洋垃圾塑料的代表性。互联网图像的主要来源是日本海洋地球科学技术振兴机构(JAMSTEC)拍摄的水下照片。训练数据集总共包含 3200 张图像。
收集影像后,该团队利用 Roboflow 等工具进行组织、注释和扩充,以提高数据集的清洁度和可变性。
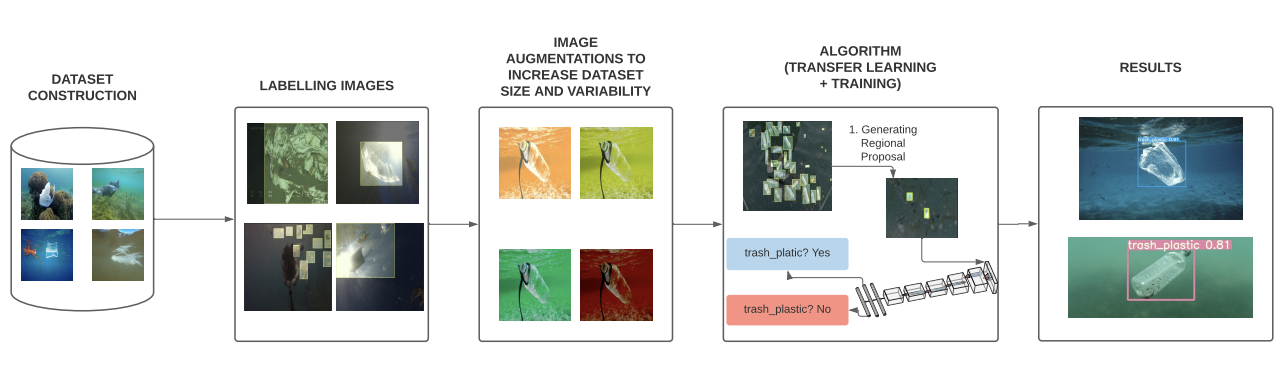
在比较了YOLOv4,YOLOv4-tiny和YOLOv5等多个模型架构后,研究人员得出结论,YOLOv5可以最好地平衡设备上边缘部署的准确性和推理速度,实现0.98 mAP和每张图像1.4毫秒的吞吐量(在Tesla V100上运行)。
鉴于该团队强调从不同条件下收集真实世界的数据,该模型在一系列水条件(颜色,亮度和接近度)中对塑料的推广相当不错。
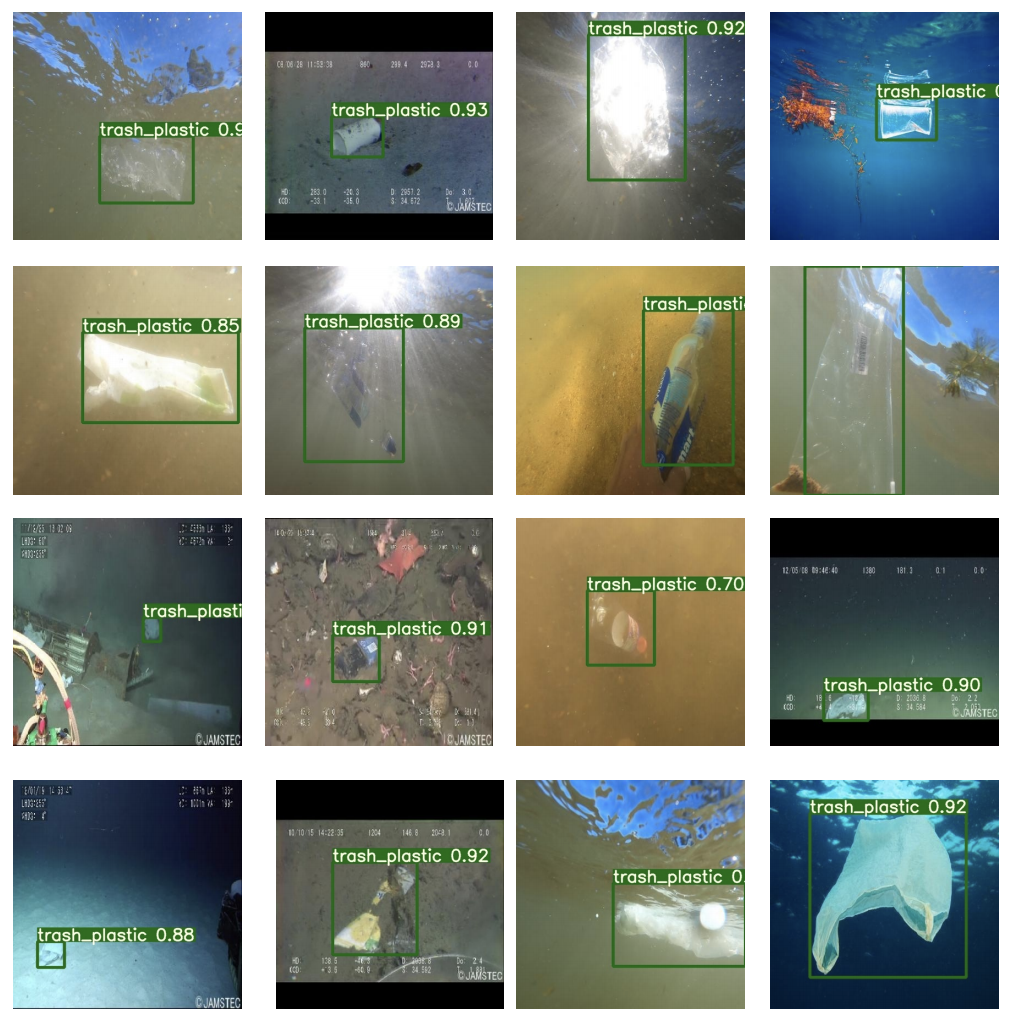
然而,该团队指出,该模型并不完美,因为错误分类的对象是可能的,并且应该在未来的原型中进一步收集数据集以及模型迭代。阅读该团队关于Arxiv的完整研究论文。
最终,我们很高兴继续看到计算机视觉的创造性应用,比如那些将改善环境健康的应用!