KITTI 数据集

数据集下载:
下载地址:
http://www.cvlibs.net/datasets/kitti/eval_object.php?obj_benchmark=3d
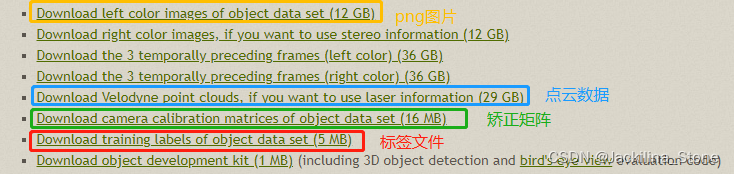
解压后为四部分内容:
相机校准矩阵calib、RGB图像image_2(.png格式)、标签label_2、点云数据velodyne对应的testing和training数据。其中,training数据为7481张(图片和点云对应的场景),testing数据(无label_2数据)。
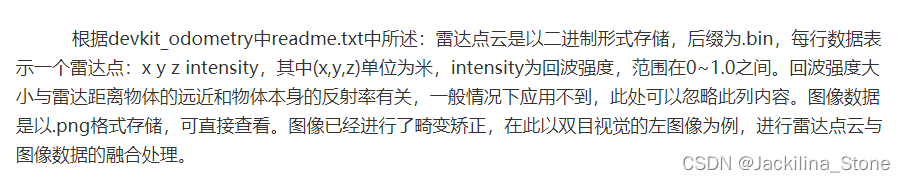
velodyne:velodyne中存储着激光雷达点云采集到数据,数据以2进制格式存储(.bin),点云数据存储格式为(N,4)。N为激光线束反射点个数,4代表着:(x,y,z,r),分别返回在3个坐标轴上的位置(单位:米)和反射率(回波强度0~1)。
数据集介绍:
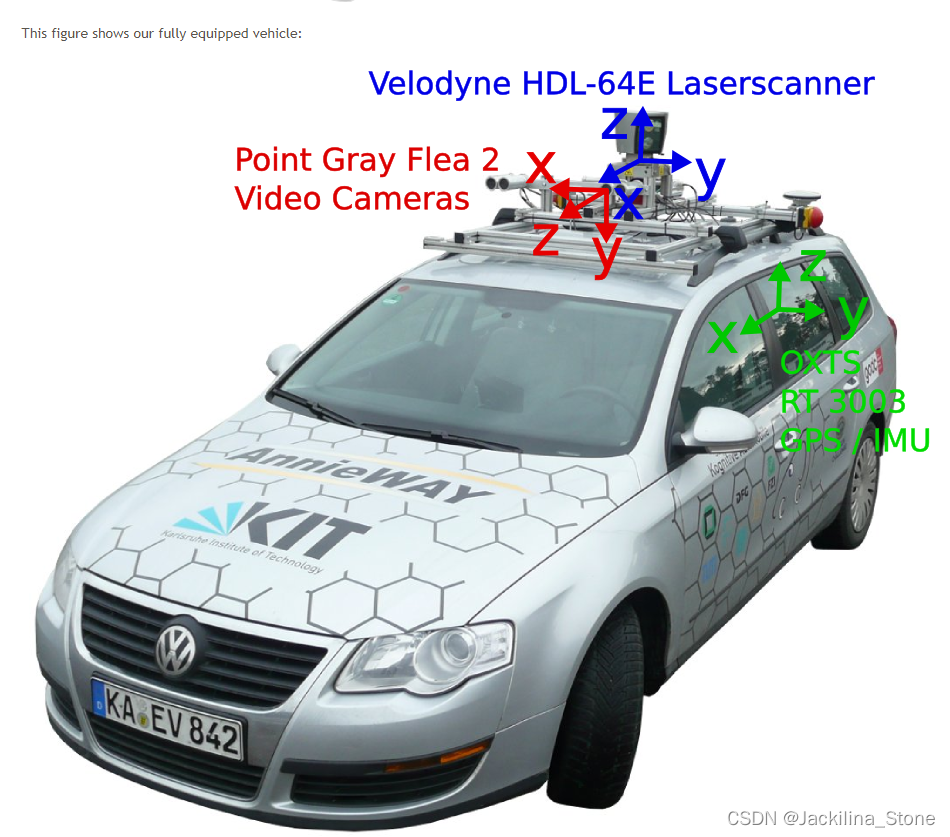
KITTI数据集的数据采集平台装配有2个灰度摄像机,2个彩色摄像机,一个Velodyne 64线3D激光雷达,4个光学镜头,以及1个GPS导航系统。
为了方便传感器数据标定,规定坐标系方向如下:
• Camera: x = right, y = down, z = forward
• Velodyne: x = forward, y = left, z = up
• GPS/IMU: x = forward, y = left, z = up
KITTI数据集中一共有三个坐标系:
1. 激光雷达坐标系 (下图1中的蓝色坐标系)
2. 相机坐标系 (下图1中的红色坐标系)
3. 图像坐标系 (下图2相机采集的图像)
如下图:

注意:同一文件名对应的图像数据与雷达点云数据属于同一个场景。
数据集文件:
(1)RGB图像image_2(.png格式)
(2)Velodyne
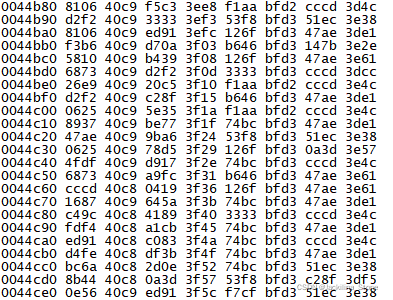
点云数据以浮点二进制文件格式存储,每行包括8个数据,每个数据四位十六进制数表示(浮点数),每位数据由空格分开。
使用hexdump可以看看000011.bin文件。
pip install hexdump
hexdump 000011.bin
结果如下图:
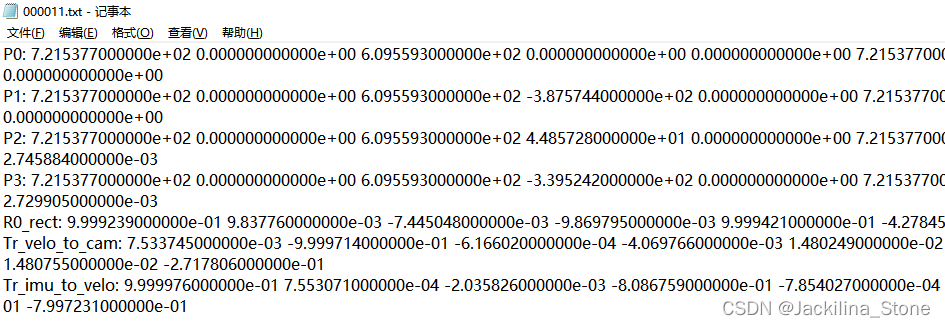
(3)calib
calib主要和坐标系转换有关。
000011.txt见下图:
(4)Label
每一行代表一个object,每一行都有16列分别表示不同的含义,如下图:
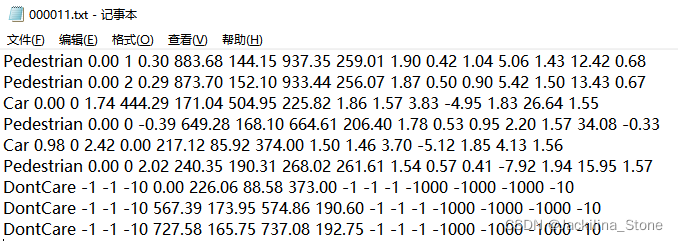
第1列:代表物体类别(type),字符串
9个类别:Car、Van、Truck、Pedestrian、Person_sitting、Cyclist、Tram、Misc、DontCare。
其中DontCare标签表示该区域没有被标注,比如由于目标物体距离激光雷达太远。为了防止在评估过程中(主要是计算precision),将本来是目标物体但是因为某些原因而没有标注的区域统计为假阳性(false positives),评估脚本会自动忽略DontCare区域的预测结果。
第2列:代表物体是否被截断(truncated),浮点数
数值在0(非截断)到1(截断)之间浮动,数字表示指离开图像边界对象的程度。
第3列:代表物体是否被遮挡(occluded),整数。整数0、1、2、3分别表示被遮挡的程度。
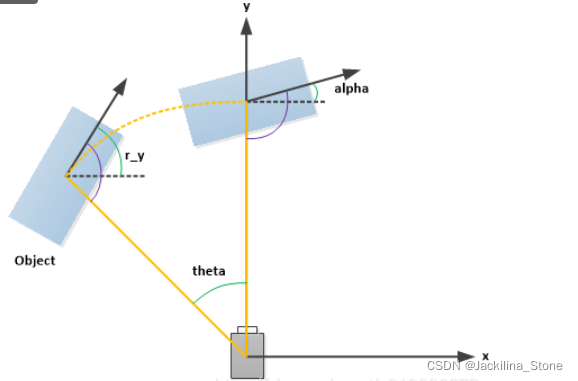
第4列(弧度数):物体的观察角度(alpha)
取值范围为:-pi ~ pi(单位:rad),它表示在相机坐标系下,以相机原点为中心,相机原点到物体中心的连线为半径,将物体绕相机y轴旋转至相机z轴,此时物体方向与相机x轴的夹角。
第5~8列(浮点数):物体的2D边界框大小(bbox)
四个数分别是xmin、ymin、xmax、ymax(单位:pixel),表示2维边界框的左上角和右下角的坐标。
第9~11列(浮点数):3D物体的尺寸(dimensions)分别是高、宽、长(单位:米)
第12-14列(整数):3D物体的位置(location)分别是x、y、z(单位:米),特别注意的是,这里的xyz是在相机坐标系下3D物体的中心点位置。
第15列(弧度数):3D物体的空间方向(rotation_y)取值范围为:-pi ~ pi(单位:rad),它表示,在照相机坐标系下,物体的全局方向角(物体前进方向与相机坐标系x轴的夹角)。
第16列(整数):检测的置信度(score)要特别注意的是,这个数据只在测试集的数据中有。如下图。
参考:https://blog.csdn.net/weixin_44145782/article/details/117294225
版权声明:本文为CSDN博主「Jackilina_Stone」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/wss794/article/details/123051358






